افراد بسیاری از اختلالات حرکتی پایینتنه رنج میبرند. با پیشرفت فناوریهای پوشیدنی، به افراد دچار مشکل حرکتی کمک میشود تا راحتتر راه بروند و به کارهای روزمرهی خود بپردازند. پروژهی XoSoft با سرمایهگذاری از سوی اتحادیه اروپا، فعالان صنعت اسکلت بیرونی را گرد هم آورده است تا یک اسکلت بیرونی نرم و انعطافپذیر و سبک و مصرف انرژی پایین طراحی کنند. برای آشنایی با اسکلت بیرونی XoSoft با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.
سالمندان، افراد دچار آسیب نخاعی ناقص و بیماران سکتهی مغزی به فناوریهای کمکی نیاز دارند تا توانایی خود را در راه رفتن بازیابند. وسایل کمکی همچون ویلچر و واکرهای چرخدار، سنگین و غیرمنعطف هستند و محدودهی حرکتی کمی را حمایت میکنند. افزون بر این، ویلچر و واکر، حرکت پاها را پشتیبانی نمیکنند. راه رفتن و داشتن فعالیت فیزیکی به صورت پیوسته برای سلامت جسمی و روحی افراد دچار مشکلات حرکتی از اهمیت بالایی برخوردار است.
برای حل کردن این مسئله، متخصصان صنعت اسکلت بیرونی از هفت کشور اروپایی در پروژهی XoSoft با یکدیگر همکاری میکنند. هدف پروژهی XoSoft، ساخت یک اسکلت بیرونی نرم و راحت است تا افراد با پوشیدن آن به راحتی به کارهای روزمره خود رسیدگی کنند و استقلال خود را دوباره بازیابند.
چگونگی عملکرد اسکلت بیرونی شبه غیرفعال XoSoft
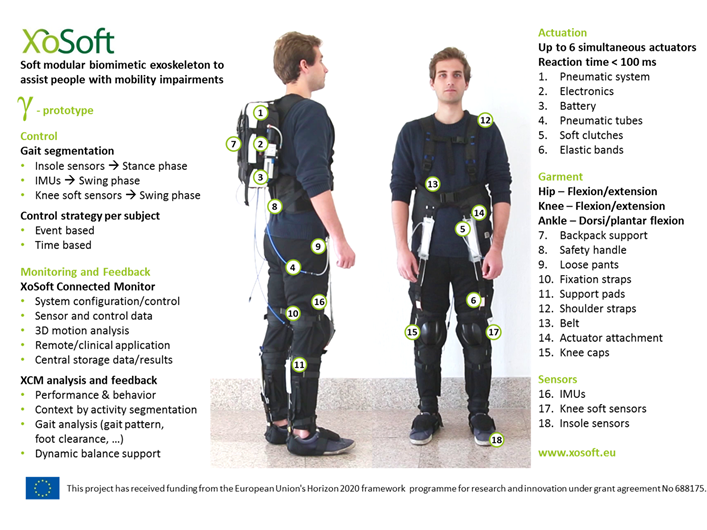
اسکلت بیرونی XoSoft را میتوان یک اسکلت بیرونی نیمه منفعل دانست. با پوشیدن اسکلت بیرونی، کاربر میتواند حرکتی شبه غیرفعال را تجربه کند. در طراحی اسکلت بیرونی XoSoft، بندهای کشسان و مکانیسم کلاچ پنوماتیک و نرم به کار رفته است. بندهای کشسان با حرکت کاربر، کشیده میشوند و تحت فشار قرار میگیرند. بندهای کشسان، توانایی ذخیرهسازی و رهاسازی انرژی را دارند بنابراین کاربر را هنگام راه رفتن پشتیبانی میکنند. فنرهای کمکی در مکانیسم کلاچ، تبادل انرژی میان اسکلت بیرونی و عضلات کاربر را کنترل میکنند. XoSoft بخشی از کنترل حرکت را بر عهدهی کاربر میگذارد.
انعطافپذیری لباس XoSoft سبب میشود حسگرها، حرکتهای عضلات کاربر را به خوبی تشخیص دهند. حسگرها اطلاعات حرکتی عضلات را به سامانهی کنترلی ارسال میکنند. سپس سامانهی کنترلی وضعیت کلاچ ها را بسته به حرکت کاربر تغییر میدهد و دخیل بودن کلاچ ها در حرکت کاربر را افزایش یا کاهش میدهد.
هدف توسعهی این اسکلت بیرونی، بهبود مشکلات حرکتی افراد سالمند و بیماران سکتهی مغزی است. افراد با محدودیت حرکتی کم تا متوسط میتوانند لباس رباتیک نرم XoSoft را بپوشند. مکانیسم کلاچ با کمک هوای فشرده موجود در یک کوله پشتی فعال میشود. ترکیب بندهای کشسان و مکانیسم کلاچ، میتواند به عنوان یک فناوری نوآورانه در توسعهی اسکلتهای بیرونی نرم به کار رود. این پروژه همواره با گرفتن بازخورد از کاربران اسکلت بیرونی و فیزیوتراپیستها و متخصصان به روند پیشرفت سرعت میبخشد.
بیشتر بخوانیم:
معرفی اسکلت های بیرونی صنعتی و پزشکی موسسه فناوری ایتالیا
نخستین اسکلت بیرونی مچ پا که میتوان زیر لباس پوشید
نگاهی به کاربردها و محدودیت های اسکلت های بیرونی فعال
منبع: therobotreport
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


