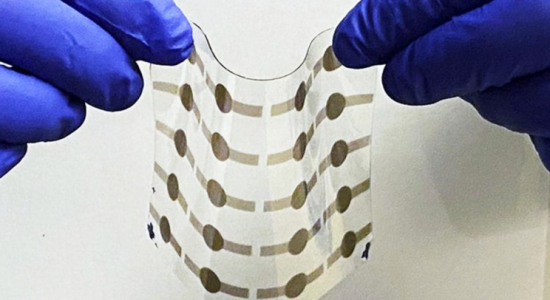
برچسب پوشیدنیای که حرکات جزئی بدن را به ابزاری برای برقراری ارتباط تبدیل میکند
تیمی از محققان از چندین موسسه در چین یک برچسب حسگر ساختهاند که میتواند حرکات و اشارات کوچک بدن را با دقت کافی به ارتباطات مفید تبدیل کند. هدف این فناوری کمک به افراد دارای ناتوانی شدید و همراه با اختلالات گفتاری است تا با کمترین تلاش بتوانند ارتباط برقرار کنند. تیمی از محققان از چندین موسسه در چین یک برچسب حسگر ساختهاند که میتواند حرکات و اشارات کوچک دست را با…