رباتهای نرم از سامانههای زیستی الهام گرفته شدهاند. سامانههایی از مواد نرم که با سیگنالهای الکتریکی ماهیت محرک پیدا میکنند. رباتهای نرم معمولا به جانداری شبیه هستند که از آن الهام گرفته شدهانند. از طرف دیگر مواد نرم شباهتی به رباتهای دیگر ندارند. آنان سامانههایی کرم مانند هستند که شبیه بازوهای یک هشت پا عمل میکنند و زیر آب به اشیا چنگ میزنند. در ادامه این نوشتار از مجله فناوریهای توان افزا وپوشیدنی فناوری محرکهای رباتهای نرم را مرور خواهیم کرد.
مزیت ربات های نرم
رباتهای نرم نسبت به سامانههای رباتیک دیگر محاسنی دارند: برهمکنش ایمن، تطبیقپذیری بالا با پوشیدنیها، سادگی سامانه gripper و ….
رباتهای نرم نسبت به رباتهای سخت با محیط برهمکنش بهتری دارند. با یک ربات نرم احتمال آسیب دیدن ربات و محیط در برخورد کمتر میشود. این قابلیت استفادههای کلینیکی از این رباتها را توجیه میکند. همچنین چنگ زدن به اشیا با یک ربات نرم بسیار سادهتر است و الگورتیم آسانتری نیز دارد.
ویژگیهای ذکر شده رباتهای نرم را استفاده از محیطهای مختلف مناسب میکند. این رباتها طیف وسیعی از طرح و فناوری را دارا میباشند. در مورد سامانه محرک دو گروه اصلی برای رباتهای نرم وجود دارد.
عملگرهای انعطاف پذیر و کابلی
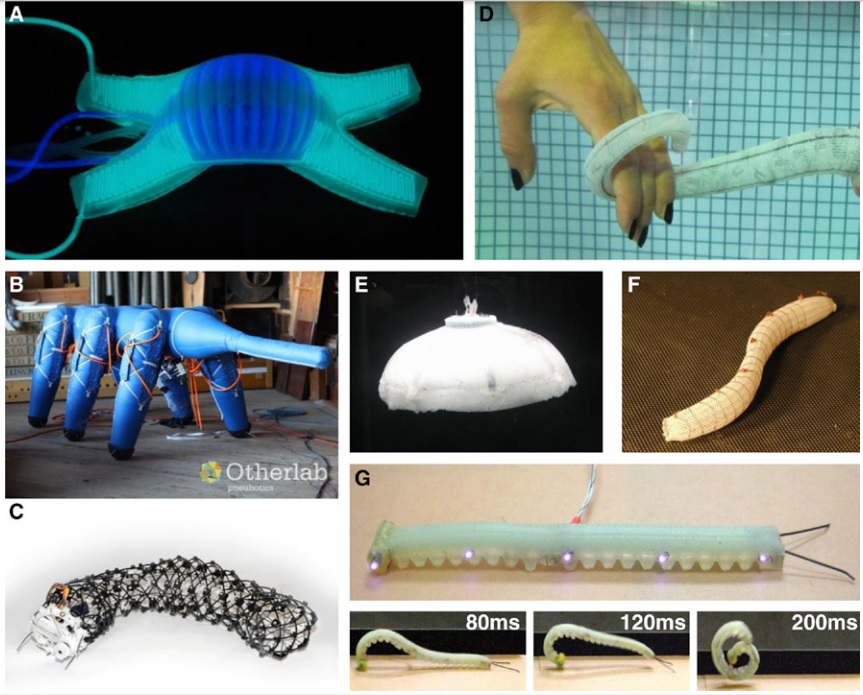
نخستین گروه از مواد سخت و پمپ برای انتقال نیرو به بدنه نرم ربات از طریق کابل و سیال تحت فشار بهره میبرد. به عنوان مثال میتوان از کیسه هوا حبس شده در یک توری برای تغییر حجم آن یا کشیدن آن نام برد. این محرکهای خطی را عموما محرکهای Mckibben یا عضلات مصنوعی مینامند. عضلات مصنوعی برای حرکت دادن انواع سامانههای دارای اسکلتهای سخت به کار میروند. روشی که اخیرا توسعه یافته است استفاده از بخشهای انبساطپذیر پلاستیکی در جهتهای خاص است(تصویر یک-A). این ادوات را میتواند وادار کرد که در یک جهت خاص حرکت کنند، در اشیا دخل و تصرف کنند و این بخشهای انعطافپذیر را پیرامون اشیا قرار دهند. زمان تورم را در این دستگاه ها میتوان کنترل کرد.
محرکهای ماشینهای بزرگی که باید راه روند نیز با اصول مشابهی ساخته میشوند(تصویر نخست-B). دستی مشابه دست هشت(تصویر نخست-D) پا و یک سامانه کش-بست دار که با تبدیل نیروی عرضی یک حرکت دایروی به حرکت مارپیچی کرموار کار میکند(تصویر نخست-C)، دو مثال از رباتهای نرم دارای محرکهای کابل دار هستند.
گروه دوم عملگرهای رباتیک نرم
این گروه مواد فعال مانند پلیمرهای electroactive و آلیاژهای حافظهدار را شامل میشود. این سامانهها برای حرکت به موتوری مجزا نیاز ندارند. اما قدرت عملگری کم، یا نیروی کم و نیاز به حمل سامانه تامین نیرو مانند باتری کاربرد این دسته را محدود میکند. شکل این سامانهها تنوع بسیاری دارد. طراحیهای مشابه بدن عروس دریایی با دندههایی از آلیاژهای حافظهدارد(تصویر نخست-E)، هزارپا و سامانه خزنده کرم مانند تنها چند مثال است.
Meshworm
ربات Meshworn(تصویر نخستF) از انقباض آلیاژهای حافظه دار در بخشهای مختلف بدنه خود بهره میبرد تا انبساطهای قطری را بخشهای مختلف بدن ایجاد کند. به این شکل تغییر نقطه تماس با زمین ممکن میشود و ربات پیش میرود. Meshworm میتواند بازده و سرعت خود را با استفاده از حسگرهایی برای سنجش طول قسمتهای مختلف بدن تغییر دهد.
GoQBot
GoQBot روی یک بخش هزارپامانند سوار میشود(تصویر نخستG). هزارپا برخلاف کرم به شکل یکسان فشار را دریافت نمیکند و بخشهای مختلف بدنش برای حرکت رقابت ندارند. بنابراین مفهوم مهمی است. این ساختار از چیزی که اسکلت محیطی نامیده میشود برای اعمال نیروی متراکم کننده به زیر بدن استفاده میکند تا تنش را در بدن خود تقسیم کند. GoQBotیک ساختار یکپارچه سیلیکونی-حافظهدار دارد که در بخش زیرین مانند عملگر کار میکند. به این صورت از خزیدن یک هزارپا تقلید میکند. بدن شکلپذیر این ربات به صورت فنری نیز درمیآید. این تغییر شکل سریع است و نیروی بالستیک حرکت خطی را با آزاد کردن انرژی الاستیک فراهم میکند.
آینده ربات های نرم
مثالهای بالا تنها چند طرح در مراحل نسخت است. فناوری رباتهای نرم به سرعت در حال توسعه است. استفاده از چاپگر سه بعدی این فناوری را دقیقتر نیز ساخته است. فناوریهای جدید پیچیدهتر است و مثلا دست یک هشت پا از کابل و آلیاژ حافظهدار هردو استفاده میکند.
ده ربات پزشکی و جراح مهم
ساخت ربات های نرم، فرصت ها و چالش ها
نفوذ ربات ها در همه جنبه های زندگی انسان
منبع: roboticsbiz
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


