تحول کنترل اسکلت بیرونی پایین تنه با سیستم کنترل جهانی پیشرفته
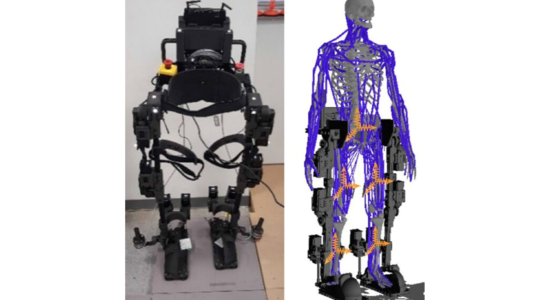
تیمی از محققان روش جدیدی را برای کنترل اسکلت بیرونی پایین تنه با استفاده از یادگیری تقویتی عمیق ایجاد کردهاند که کنترل قویتر و طبیعیتر راه رفتن را برای کاربران اسکلت بیرونی اندام تحتانی امکان پذیر میکند.
