یک تیم رباتیک در آزمایشگاه رباتیک چند مقیاسی در دانشگاه ETH زوریخ، که با چندین بیمارستان در سوئیس کار میکنند، یک ربات مغناطیسی ساختهاند که میتواند به طور بالقوه برای درمان افراد پس از سکته مغزی مورد استفاده قرار گیرد. مقاله آنها در مجله Science Robotics منتشر شده است.
در سکتههای ایسکمیک، یک عامل انسدادی (معمولاً یک لخته خون یا پلاک) در رگهای کوچک مغز قرار میگیرد. نتیجهی این انسداد، از جریان خون به مغز جلوگیری میکند و سلولهای مغز را از بین میبرد. چنین سکتههایی میتواند باعث آسیب مغزی و گاهی مرگ شود. درمان آنها بسیار حساس به زمان است. هر چه مدت زمان بیشتری برای رفع انسداد طول بکشد، آسیب مغزی بیشتری رخ میدهد.
درمانهای کنونی شامل داروهایی است که میتوانند تودهای که باعث انسداد شده را بشکنند، یا سیم راهنمایی است که از طریق شریان فمورال وارد شده و به داخل فشار داده شده و هدایت میشود تا زمانی که نوک آن به انسداد برسد. هر دو روش درمانی زمانبر هستند، به این معنی که سلولهای مغز در انتظار رسیدن خون به آنها میمیرند. در این تلاش جدید، تیم تحقیقاتی رویکرد جدیدی را ایجاد کرد که امکان واکنش بسیار سریعتر را فراهم میکند.
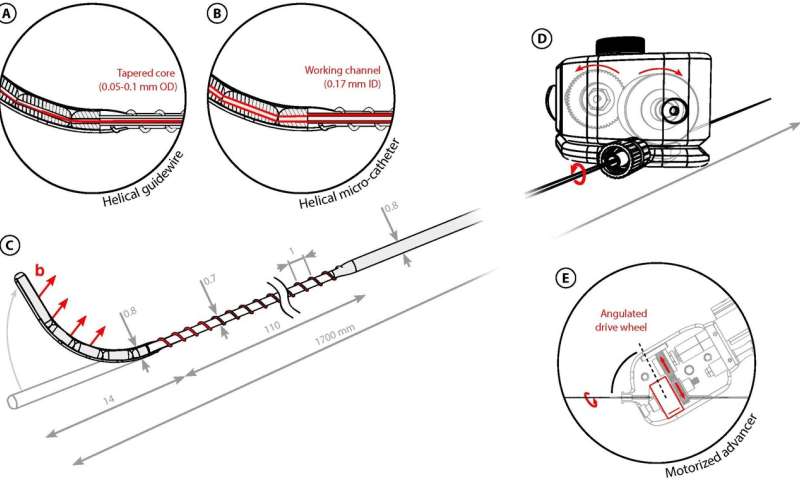
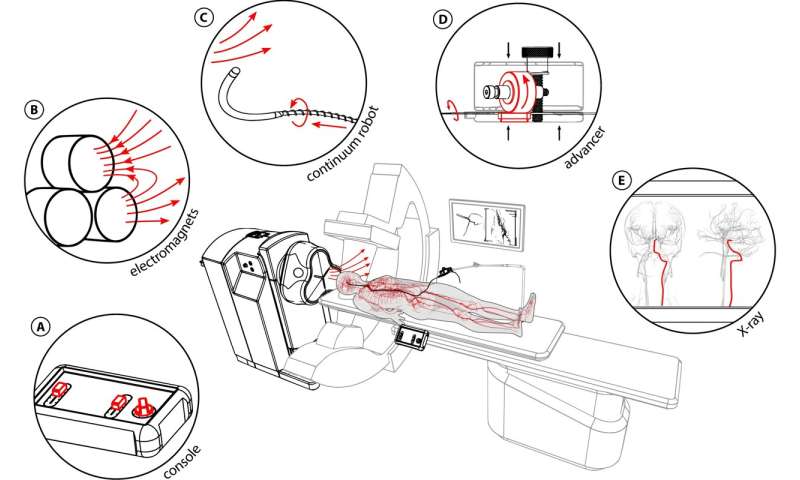
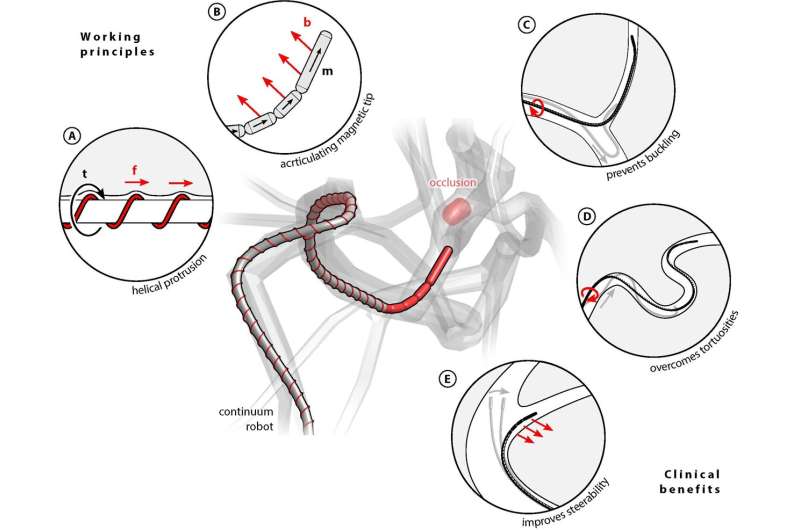
این تیم یک ربات پیچی شکل به اندازه کافی کوچک ساختند که در داخل رگهای خونی کوچک جای بگیرد. استفاده از آهنربای خارجی باعث میشود ربات بچرخد و به جلو برود. این تیم یک نوک نرم در جلوی ربات اضافه کردند تا از آسیب به رگهای خونی در هنگام عبور از آن جلوگیری کند.
این تیم معتقد است که این ربات میتواند برای حرکت سریع در رگهای خونی تا رسیدن به انسداد مورد استفاده قرار گیرد. همچنین میتواند با ورود به مغز، به محل انسداد بسیار نزدیکتر شود. پس از رسیدن به انسداد، ربات میتواند برای سوراخ کردن موادی که باعث ایجاد انسداد شده، استفاده شود و اجازه دهد خون دوباره از رگ عبور کند.
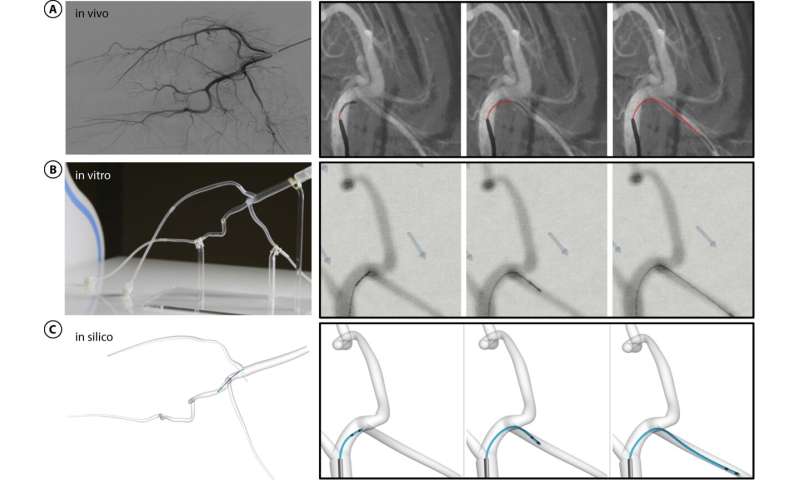
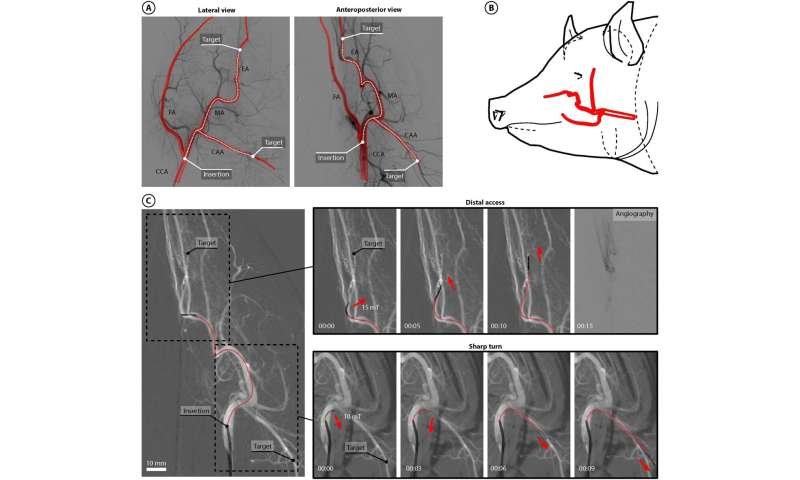
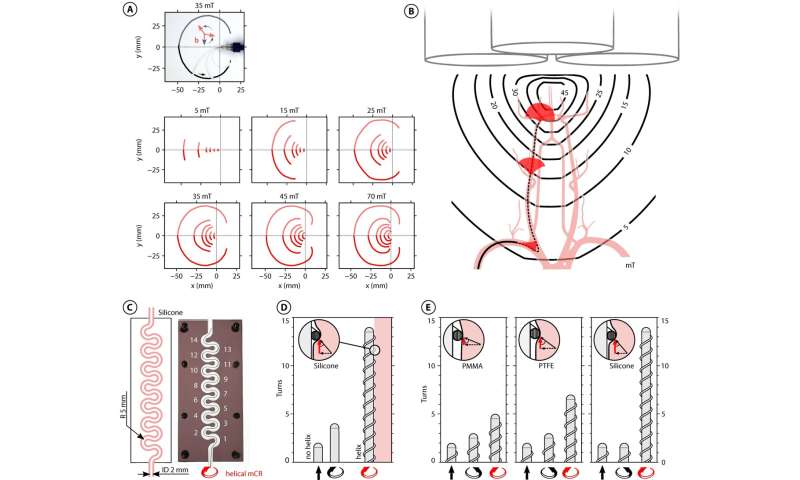
تاکنون، این تیم ربات خود را بر روی مدلهای شبیهسازی شده، جفت انسانی در آزمایشگاه و در خوک زنده آزمایش کردهاند. این ربات به اندازه کافی خوب عمل کردهاست. آزمایشات ادامه دارد و هدف آن درمان بیماران انسانی در آیندهای نزدیک است.
> پچ پوشیدنی بدون باتری دریافت کننده علائم حیاتی
>> پچ پوستی انعطاف پذیر برای سنجش سلامت
منبع: medicalxpress.com
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


