پژوهشگران در دانشگاه MIT رباتهای شفافی از جنس هیدروژل ساختند که به کمک پمپاژ آب به داخل یا بیرون از ساختار آن فعال میشوند. هیدروژل برخلاف دیگر موادی که برای ساختن رباتیک نرم استفاده میشود، نرم، مرطوب و زیست سازگار است. رباتهای هیدروژلی به اندازه کافی قوی و سریع هستند که بتوانند یک ماهی را حین شنا کردن بگیرند و بدون آسیب رساندن، آن را رها کنند.
Xuanhe Zhao، استادیار مهندسی مکانیک و مهندسی عمران و محیط زیست در دانشگاه MIT میگوید: « هیدروژل نرم، مرطوب و زیست سازگار است و میتواند رابطه دوستانهای با اعضای بدن انسان داشته باشد». تصویر: Hyunwoo Yuk/ آزمایشگاه مواد نرم فعال MIT
مهندسین در دانشگاه MIT رباتهای مبتنی بر ژل و شفافی ساختند که زمانی که آب به داخل و یا خارج از آنها پمپ میشود حرکت میکنند. این رباتها میتوانند تعدادی از وظایف سریع و مؤثر از جمله لگد زدن به یک توپ در زیر آب و گرفتن و آزاد کردن ماهی زنده را انجام دهند.
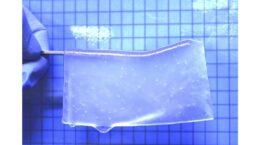
این رباتها به طور کامل از هیدروژل ساخته شدهاند. هیدروژل یک ماده شفاف، شبیه لاستیک و بادوام است که عمدتاً از آب تشکیل شده است. هر ربات یک مجموعه توخالی از سازههای هیدروژلی است که به لولههای لاستیکی متصل است. هنگامی که پژوهشگران آب را به داخل ربات هیدروژلی پمپ میکنند، ساختارهای به سرعت در جهتی که رباتها را قادر به حلقه شدن یا کشش میسازد، پر از گاز میشوند.
گروه چندین ربات هیدروژلی از جمله ساختاری شبیه بال ماهی که بال میزند و به پیش میرود، یک زائده بند بند که میتواند لگد بزند و یک ربات به شکل دست و نرم که میتواند جمع شود و فشار وارد کند و دوباره به حالت اولیه بازگردد، ایجاد کردند.
از آنجا که ربات هم از آب ساخته شده و هم با آب فعال میشود، دارای خواص تصویری و صوتی شبیه به آب است. پژوهشگران پیشنهاد میدهند که اگر این رباتها برای برنامههای کاربردی زیر آب طراحی شوند ممکن است تقریباً نامرئی باشند.
این گروه، توسط Xuanhe Zhao، استادیار مهندسی مکانیک و مهندسی عمران و محیط زیست در دانشگاه MIT رهبری میشود و دانشجوی کارشناسی ارشد Hyunwoo Yuk در حال حاضر به دنبال انطباق ربات هیدروژلی برای کاربردهای پزشکی است.
Zhao میگوید: «هیدروژل نرم، مرطوب و زیست سازگار است و میتواند رابطه دوستانهای با اعضای بدن انسان داشته باشد. ما به طور جدی با گروههای پزشکی همکاری داریم تا این سامانه را به دستهای هیدروژلی که در طول عمل جراحی میتوانند برای بافتها و اندامها نرمتر باشند، تبدیل کنیم».
Zhao و Yuk نتایج خود را در مجله Nature Communications منتشر کردند. همکاران آنها عبارتند از Shaoting Lin و Chu Ma دانشجویان فارغالتحصیل از دانشگاه MIT و مهدی تکفلی فوق دکترا و Nicholas X. Fang استادیار مهندسی مکانیک.
دستورالعمل ربات
گروه Zhao در پنج سال گذشته دستورالعملهایی برای هیدروژل توسعه دادهاند: راهکارهای ترکیب پلیمر و آب و استفاده از ترفندهایی که آنها برای ساخت مواد مقاوم و در عین حال دارای قابلیت کشسانی ابداع کردند. آنها همچنین روشهایی برای چسباندن این هیدروژل به سطوح مختلف مانند شیشه، فلز، سرامیک و لاستیک و ایجاد پیوستگی بسیار قوی که مانع از هم پاشیدن آن میشود، توسعه دادند.
گروه متوجه شد که چنین هیدروژلهای مقاوم و دارای قابلیت انعطاف ممکن است مواد ایدهآلی برای استفاده در رباتیک نرم باشند. بسیاری از گروهها، رباتهای نرم را از لاستیکی شبیه سیلیکون میسازند، اما Zhao اشاره میکند که چنین موادی به اندازه هیدروژل، زیست سازگار نیستند. وی میگوید: چون هیدروژل عمدتاً از آب تشکیل شده است، به طور طبیعی برای استفاده در یک محیط پزشکی مناسبتر و ایمنتر است. و در حالی که دیگران بواسطه هیدروژل در تلاش برای ساخت ربات هستند، نتیجه راهکارهای آنها موادی شکننده و نسبتاً انعطاف ناپذیر است که با استفاده مکرر شکاف برمیدارند یا از هم پاشیده میشوند. در مقابل، گروه Zhao فرمولاسیونی برای ساخت رباتیک نرم و قابل انعطاف که به خوبی خم میشود را پیدا کردند.
Yuk میگوید: «ما ابتدا درباره این نوع پروژه (رباتیک نرم) فکر نمیکردیم، اما متوجه شدیم شاید راهکارهای ما بتواند بسیار مقاوم باشد تا این مادههای لزج را به محرکهای قوی و سازههای رباتیک تبدیل کند».
سریع و قوی
پژوهشگران برای اعمال مواد هیدروژلی به رباتیک نرم، نخست به دنیای حیوانات نگاه کردند. آنها به ویژه روی لپتوسفالی یا مارماهی شیشهای متمرکز شدند که یک مارماهی کوچک، شفاف و شبیه هیدروژل است که در اقیانوس تخمگذاری میکند و در نهایت به زیستگاه طبیعی خود، رودخانه مهاجرت میکند.
Yuk میگوید: «این سفر بسیار طولانی است و هیچ وسیله حفاظتی وجود ندارد. به نظر میرسد که آنها سعی در تکامل به سوی یک شکل شفاف دارند که یک ترفند استتار کارآمد است. و ما قصد داشتیم تا به چنین سطحی از شفافیت، نیرو و سرعت دست پیدا کنیم».
برای این کار، Yuk و Zhao از چاپ سه بعدی و ترفند برش لیزری برای چاپ دستورالعمل هیدروژلی خود به شکل ساختارهای رباتیک و دیگر واحدهای توخالی استفاده کردند و آنها را به لولههای لاستیکی کوچکی که به پمپهای بیرونی متصل میشد، محدود کردند.
گروه برای به کار انداختن و یا حرکت این ساختارها از پمپهای سرنگی برای تزریق آب از طریق ساختارهای توخالی استفاده کردند. با این روش، رباتها بسته به شکل کلی خود قادرند سریعاً حلقه یا کشیده شوند.
Yuk و Zhao فهمیدند که با پمپاژ آب به داخل ساختار میتوانند واکنشهای سریع و قوی تولید کنند و ربات هیدروژلی را قادر سازند تا چند نیوتن نیرو در یک ثانیه ایجاد کند. سایر پژوهشگران روی ربات هیدروژلی مشابهی کار میکنند که با نفوذ آب فعال میشود و اجازه میدهند آب به طور طبیعی به ساختار نفوذ کند. این یک فرایند آهسته است که بیش از چند دقیقه یا چند ساعت طول میکشد تا چند میلی نیوتن نیرو تولید شود.
گرفتن و رها کردن ماهی
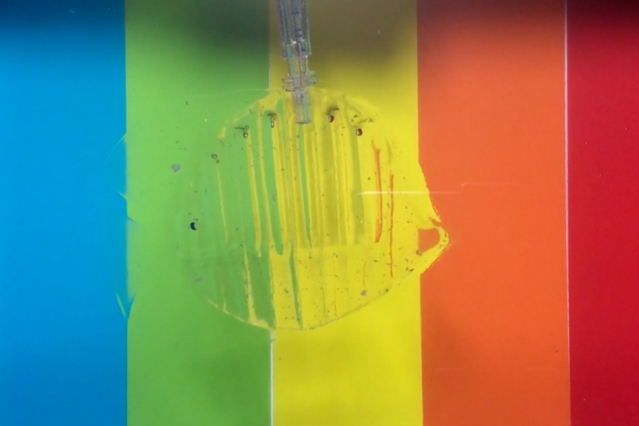
گروه در آزمایشهای طراحی شده با استفاده از چندین ربات هیدروژلی متوجه شد که ساختار قادر به تحمل استفاده مکرر تا ۱۰۰۰ چرخه بدون پارگی یا از هم پاشیده شدن بود. آنها همچنین دریافتند که هر یک از طرحهای قرار داده شده در زیر آب با پس زمینههای رنگی، به نظر میرسد که تقریباً به طور کامل پنهان شدهاند. این گروه خواص آکوستیک و نوری ربات هیدروژلی را اندازهگیری کردند و متوجه شدند که این ویژگیها نزدیک به ویژگیهای آب است، بر خلاف لاستیک و سایر موادی که معمولاً در رباتیک نرم استفاده میشود.
گروه در یک نمایش قابل توجه از این فناوری، یک چنگ رباتیک شبیه دست ساختند و آب را به داخل و بیرون از این انگشتها پمپ کردند تا این دست باز و بسته شود. پژوهشگران این دست را در یک مخزن با یک ماهی قرمز غوطهور کردند و نشان دادند که این پنجه به اندازه کافی قوی و سریع است که هنگام شنا کردن ماهی دور آن بسته شود.
Zhao میگوید: «این ربات تقریباً شفاف است و دیدن آن بسیار مشکل است. هنگامی که ماهی را آزاد میکنید، آن کاملاً خوشحال به نظر میرسد چون ربات نرم است و به ماهی آسیبی نمیرساند. یک دست رباتیک سخت احتمالاً ماهی را در هم میکوبد».
پژوهشگران در نظر دارند در مرحله بعد برنامههای کاربردی ویژهای برای رباتیک هیدروژلی شناسایی کنند و همچنین دستورالعملهای خود را متناسب با کاربردهای ویژه تغییر دهند. برای نمونه، برنامههای کاربردی پزشکی ممکن است به ساختارهایی کاملاً شفاف نیاز نداشته باشد و برنامههای کاربردی دیگری ممکن است نیاز داشته باشد تا بخشهای خاصی از یک ربات سختتر از دیگر قسمتها باشد. Yuk میگوید: «ما میخواهیم از یک برنامه واقع بینانه و بهینهسازی مواد برای رسیدن به چیزی تأثیرگذار استفاده کنیم».
این پژوهش توسط دفتر پژوهشهای نیروی دریایی، مؤسسه MIT برای فناوری نانو نظامی و بنیاد ملی علوم حمایت میشود.
منبع: robohub