:: نوشتۀ Bobby Marinov
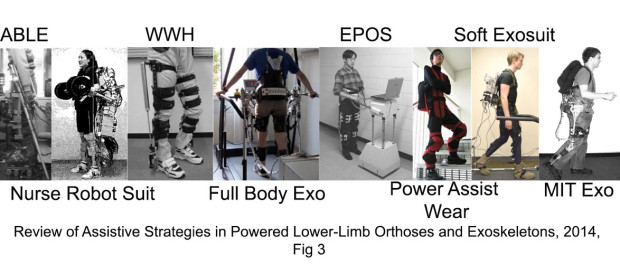
شکل ۳: ABLE، ربات پرستار، WWH، اسکلت بیرونی کامل ساختۀ T. Matsubara، ربات EPOS، اسکلت پوشیدنی کمک حرکتی ساختۀ D. Saaki، اسکلت بیرونی نرم، اسکلت بیرونی MIT / مروری بر استراتژیهای کمک حرکتی در ارتزهای برقی پایین تنه و اسکلتهای بیرونی
وبگاه Cyberlegs به تازگی مقالههایی تمام متن را دربارۀ پژوهشهای اسکلتهای بیرونی منتشر کرده که میتوان آنها را به رایگان دریافت و مطالعه کرد. یکی از این مقالهها به طور ویژه مناسب آشنایی با پژوهشها و توسعۀ اسکلتهای بیرونی تا پایان سال ۲۰۱۴ است:
Review of Assistive Strategies in Powered Lower-Limb Orthoses and Exoskeletons, Tingfang Yana (1), Marco Cempinia (1), Calogero Maria Oddoa (1), Nicola Vitiello (1,2), 2014, 1.The BioRobotics Institute, Scuola Superiore Sant’Anna, viale Rinaldo Piaggio 34, 56025 Pontedera (PI), Italy. 2.UO Riabilitazione Cardiaca, Fondazione Don Carlo Gnocchi, Via di Scandicci, 50143 Florence, Italy. pdf: cyberlegs.eu
اگر شما به تازگی پا به حوزۀ اسکلتهای بیرونی و رباتهای پوشیدنی گذاشتهاید یا تنها با ۲۰ تا ۳۰ پروژۀ اسکلت بیرونی آشنایی دارید مقالۀ بالا قطعاً برای شما مفید خواهد بود.
این مقاله شما را با دهها اسکلت بیرونی به همراه استراتژیهای کنترلی و نتایج آزمایشگاهی آنها آشنا میکند:
A Mechatronic System For Robot-Mediated Hand Telerehabilitation, Mario Cortese, Marco Cempini, Member, IEEE, Azzurra Chiri, Paulo Rogério de Almeida Ribeiro, Surjo R. Soekadar, Maria Chiara Carrozza1, Member, IEEE, Nicola Vitiello, Member, IEEE, 2014, Italy, pdf: cyberlegs.eu
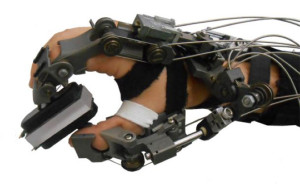
دستکش بیرونی کارکرد از دور برای توانبخشی دست / یک سامانۀ مکاترونیکی برای توانبخشی دست از راه دور به کمک ربات.
مقالۀ بالا نتایج پژوهش دربارۀ یک سامانۀ پایه – پیرو اسکلت بیرونی برای توانبخشی از راه دور است. وسیلهای که در این مقاله ارائه شده بسیار ساده و کاربردی است.
این نوع از دستکشهای اسکلت بیرونی در مقالۀ مروری پیشین پوشش داده نشدهاند. این مقالهها را میتوانید در وبگاه cyberlegs.eu بیابید (در صفحۀ اصلی وبگاه، از منوی اصلی Results و سپس Publications را انتخاب کنید). این وبگاه یک مقالۀ کامل نیز دربارۀ مکانیزمهای خود تنظیم شونده (self-alignment mechanisms) برای رباتهای پوشیدنی (۲۰۱۲)، یک اسکلت بیرونی برای فیزیوتراپی آرنج (۲۰۱۳) و کنترل ارادی آن با سیگنالهای EMG (2012) نیز دارد. پروژۀ Cyberlegs هماکنون کامل شده و مشخص نیست تا چه زمانی دسترسی به این مقالهها بر روی این وبگاه برقرار خواهد بود.
اسکلتهای بیرونی تغییر شکل دهنده (Transformers)

EXOwheel / دانشکدۀ مهندسی مکانیک دانشگاه Sogang کره جنوبی
انتشارات MDPI که مقالههای خود را به صورت آزاد منتشر میکند یک مقالۀ تمام متن منتشر کرده که در آن یک ویلچر را معرفی میکند که میتواند به یک اسکلت بیرونی تغییر شکل دهد. اسکلت بیرونی برای اندازهگیری گشتاور تولید شده از سوی کاربر از حسگرهای گشتاور بهره میبرد:
A Method to Accurately Estimate the Muscular Torques of Human Wearing Exoskeletons by Torque Sensors, Beomsoo Hwang, Doyoung Jeon, April 2015, Department of Mechanical Engineering, Sogang University, Seoul 121-742, Korea, Link: http://www.mdpi.com/1424-8220/15/4/8337
>> در همین زمینه بخوانید: انواع اسکلتهای بیرونی و طبقه بندی آنان
>> در همین زمینه بخوانید: فهرست شرکتهای فعال در زمینۀ ساخت اسکلتهای بیرونی
منبع: Exoskeleton Report


