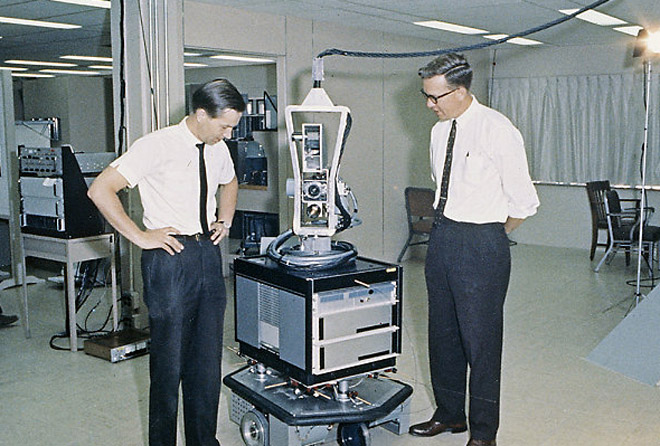
ربات Shaky اولین ربات هوشمند و متحرک جهان است که در موسسهی بین المللی پژوهشی استنفورد (SRI International) در سالهای ۱۹۶۶ تا ۱۹۷۲ توسعه داده شده است. Shaky اولین رباتی است که افتخار دریافت جایزهی IEEE Milestone در مهندسی برق و محاسبات را کسب نموده است. نشان افتخار برنامهی IEEE Milestone به اختراعات، مکانها و وقایع ارزشمند در زمینههای مهندسی برق و محاسبات که جامعهی انسانی از مزایای آنها بهرهمند شدهاند و دست کم بیست و پنج سال از ارائهی آنها میگذرد، تعلق میگیرد. با مجلهی فناوریهای توان افزا و پوشیدنی همراه باشید.
Bill Mark، رئیس بخش اطلاعات و علوم محاسباتی SRI گفت «Shakey به خاطر توانایی درک، تحلیل و عمل در محیط اطرافش پیشگام بود.» او افزود «ما بسیار هیجان زدهایم که Shakey به کسب این افتخار از IEEE مفتخر شده است. دریافت این جایزه شاهدی بر تاثیر عمیق این ربات بر رباتیک جدید و ترفندهای هوش مصنوعی حتی تا امروز است.»

ربات اصلی Shakey در موزهی تاریخ رایانه به نمایش گذاشته شده است. در سال ۱۹۷۰ مجلهی Life ربات Shakey را تحت عنوان «اولین انسان الکترونیکی» معرفی کرد و مجلهی National Geographic نیز تصویری از آن را در مقالهای دربارهی استفادههای کنونی و احتمالات آیندهی رایانهها منتشر نمود. افزون بر این ربات Shakey در سال ۲۰۰۴ به عنوان یک فناوری تاثیرگذار در زمینهی رباتیک در لیست Carnegie Mellon’s Robot Hall of Fame قرار گرفت.
پروژهی ساخت ربات Shakey توسط Charles A. Rosen آغاز شد. از نظر او این ربات فقط یک دستگاه خودکار نبود بلکه یک بستر آزمایشگاهی برای یکپارچه سازی تمامی زیرشاخههای هوش مصنوعی بود. در این پروژه استدلال منطقی، برنامه ریزی مستقل، اجرای برنامه، یادگیری ماشین، بینایی رایانهای (computer vision)، تعیین مسیر (navigation)، و برقراری ارتباط به زبان رایج انگلیسی برای اولین بار در یک سامانهی فیزیکی گردآوری شده بودند. Nils J. Nilsson، Bertram Raphael و Peter E. Hart پس از Rosen پروژه را سرپرستی کردند.
از لحاظ فنی ربات Shakey به سه دلیل به عنوان یک فناوری تاریخی تاثیرگذار شناخته میشود:
۱)ساختار نرم افزار کنترل آن ضمن یک معماری لایهای شکل داده شد که مدلی برای ساخت رباتهای بعدی بود.
۲)بینایی رایانهای و روشهای برنامه ریزی و تعیین مسیر این ربات نه تنها در ساخت رباتهای بعدی بسیاری به کار گرفته شد، بلکه در کاربردهای صنعتی هم از آن استفاده شد.
۳)Shakey یک دلیل حاضر برای تشویق سایر تولیدکنندگان به ساخت رباتهای پیشرفتهتر بود.
Kuffner که تا سال ۲۰۱۶ به مدت ۷ سال سرپرست پژوهشهای رباتیک شرکت Google بوده است، در یک ارتباط خصوصی نوشت «پیشگام بودن پروژهی Shakey در زمان خود از نظر معماری و الگوریتم بسیار جالب توجه است این ربات به مدت نیم قرن به عنوان نمونهای برای ساخت سامانههای رباتیکی بعدی بوده است.»
۱.۱ نرم افزار کنترل لایهای برای رباتها
نرم افزار کنترل ربات Shakey به صورت یک ساختار سلسله مراتبی چند سطحی بود به طوری که حرکات فیزیکی در پایینترین سطوح، برنامهریزیهای مستقل در سطح میانی و اجرای برنامهها با قابلیت بازیابی خطا در بالاترین سطح قرار گرفته بودند (مرجع ۱:SRI-AIC Tech Note 323) این طراحی در ساخت بسیاری از رباتهای بعدی به کار گرفته شد. به عنوان یک نمونهی برجسته میتوان STANLEY را نام برد که یک وسیلهی نقلیهی خودران است و جایزهیDARPA Grand Challenge را در سال ۲۰۰۵ برای رانندگی خودکار در بیابان Mojave از آن خود کرده است. سرپرست این پروژه، Sebastian Thrun، در یک ارتباط خصوصی نوشت « در هسته یک ساختار لایهای مانند ساختار Shakey به کار بردیم. تصویر شمارهی ۵ در این مقاله معماری نرم افزاری سطح بالای این پروژه را به صورت خلاصه نشان میدهد که باید به نظر آشنا برسد (مرجع ۲:Thrun).» با بررسی تصویر شمارهی پنج طراحی یک ساختار نرم افزاری لایهای در هستهی برنامه ریزی و کنترل تایید خواهد شد.
۱.۲ الگوریتمهای استفاده شده در ساخت Shakey
از میان تمام روشهای محاسباتی توسعه داده شده در پروژهی ساخت ربات Shakey سه روش تاثیر دراز مدتی بر تکنولوژی و زندگی روزانهی همهی ما داشته است.
۱.۲.۱ Hough، تبدیلی برای شناسایی خطوط در تصاویر
در سال ۱۹۶۲ Paul Hough روشی برای شناسایی نقاط هم خط (co-linear points) در تصاویر را به ثبت رساند. در این روش نقاط تصویر به خطوط راستی در فضای تبدیل تغییر مییافت. روش Hough با استقبال قابل توجهی مواجه نشد زیرا فضای تبدیل نامحدود و گسترده آن از لحاظ محاسباتی قابل اجرا نبود. Peter E Hart و Richard O. Duda در سال ۱۹۷۲ یک نسخهی سینوسی جدید از این تبدیل ارائه کردند که مشکلات نسخهی قبلی را نداشت. آنها تبدیل را مجددا نام گذاری ننمودند. (مرجع ۳: Hough). تاریخچهی این ابداع بعدا توسط Hart ثبت شد (مرجع ۴: Hough History).
نسخهی Hart از تبدیل Hough یکی از پرکاربردترین الگوریتمهای مورد استفاده در بینایی رایانهای است. این الگوریتم برای چندین دهه در کاربردهایی مانند بازرسی بصری در عرصهی ساخت و تولید به کار گرفته شده است. از سال ۲۰۱۴ استفاده از این الگوریتم در خودروها آغاز شد که یک ویژگی ایمنی به آنها اضافه میکرد و در صورتی که خودرو در حال انحراف و خارج شدن از جاده بود به راننده هشدار میداد. بر مبنای گزارش Google Scholar این مقالهی مرجع تا سال ۲۰۱۵ در حدود ۵۰۰۰ هزار مرتبه مورد ارجاع قرار گرفته است و بر اساس اطلاعات ادارهی Patent and Trademarks آمریکا تا همین تاریخ در حدود ۲۱۱۵ گواهی ثبت اختراع صادر شده در آمریکا به این مقاله ارجاع نمودهاند.
۱.۲.۲ قوانین STRIPS، اجرای برنامهی جهان واقعی (Real World Plan Execution) و بازیابی خطا
سامانهی برنامه ریزی ربات Shakey را STRIPS (مخففStanford Research Institute Problem Solver) نام گذاری کردهاند (مرجع ۵: STRIPS). این سامانه با استفاده از سه قانون منطق اقدامات در دسترسش را مشخص میکند: شرایط اولیه (Pre-conditions)، لیست حذفی (Delete List) و لیست اضافی(Add List) عملکرد. این سامانه راهحلی عملی برای یک مشکل معروف در هوش مصنوعی است که Frame Problem نامیده میشود. قوانین STRIPS مبنای تعداد زیادی از سامانههای برنامه ریزی بعدی قرار گرفتند (مرجع۶: STRIPS Retro).
افزون بر این، برنامههای STRIPS در یک سامانهی نظارت بر اجرای برنامه و بازیابی خطا با نام PLANEX گردآوری شدهاند. مقالهی اصلی مربوط به این سامانه (مرجع۷: STRIPS.PLANEX) یکی از مقالاتی است که بیشترین تعداد بازنشر را در تاریخ هوش مصنوعی داشته است. جدیدترین بازنشر این مقاله بیش از ۲۰ سال پس از انتشار اولیهی آن اتفاق افتاده است. (مرجع ۸: Re.Pub)
۱.۲.۳ الگوریتم کوتاهترین مسیر A*
الگوریتم A* (مرجع۹: AStar) به صورت اثبات پذیری کوتاهترین یا به طور کلی کم هزینهترین مسیر موجود در یک شبکه را محاسبه میکند (احتمالا این کار را با انجام کمترین میزان محاسبات انجام میدهد). این الگوریتم تا به امروز بسیار پرکاربرد بوده است. به عنوان نمونه میتوان به محاسبهی مسیرهای رانندگی (چه با استفاده از خدمات وب و چه با استفاده از سامانههای تعیین مسیر)، برنامه ریزی مسیر کاراکترها در بازیهای ویدیویی (مرجع ۱۰: Woodcock) و ترسیم مسیر وسایل نقلیهی مریخ نورد اشاره کرد (مرجع ۱۱: DStar).
بنا به گزارش Google Scholar تا سال ۲۰۱۵ مقالهی مرجع الگوریتم A* در حدود ۵۰۰۰ مرتبه مورد ارجاع قرار گرفته است و بر اساس اطلاعات ادارهی Patent and Trademarks آمریکا تا همین تاریخ در حدود ۴۹۰ گواهی ثبت اختراع صادر شده در آمریکا به این مقاله ارجاع نمودهاند.
۱.۳ اولین ربات هوشمند جهان
در نشست کنفرانس بینالمللی رباتیک و اتوماسیون در سال ۲۰۱۵ بخشی با نام جشن پنجاهمین سالگرد Shakey برگزار شد. این بخش شامل سخنرانیهای برجستهای بود. پروفسور Ruzena Bajcsy از دانشگاه برکلی و مدیر CITRIS ، Rodney Brooks رئیس سابق آزمایشگاه CS/AI در دانشگاه MIT و بنیان گذار شرکتهای iRobot وRethink Robotics، پروفسور Peter Hart، سرپرست پروژهی Shakey و نویسندهای که بر اساس Google Scholar بیشترین تعداد ارجاعات در زمینهی رباتیک به مقالههای او بوده است، Nils Nilsson سرپرست پروژهی Shakey و رئیس سابق CS در دانشگاه استنفورد، James Kuffner مدیر پژوهشهای رباتیک در شرکت Google ، پروفسور Benjamin Kuipers از دانشگاه میشیگان و پروفسور Manuela Veloso از دانشگاه CMU در این نشست شرکت داشتند. اطلاعات ارائه شده در این نشست دربارهی برجستهترین تاثیرات ربات Shakey به عنوان اولین سامانهی فیزیکی با قابلیتهای محاسباتی درک، تحلیل و عمل بود.
بر روی یک پلاک برنزی در موسسهی بین المللی پژوهشی استنفورد از طرف IEEE Milestone نوشته شده است : مرکز هوش مصنوعی موسسهی پژوهشی استنفورد اولین ربات متحرک و هوشمند جهان،Shakey، را توسعه داده است. این ربات توانایی درک محیط اطراف خود را دارد، میتواند حقایق ضمنی را از حقایق عینی استنتاج کند، میتواند برنامه طراحی کند و خطاهای اجرایی برنامهها را بازیابی نماید و قادر است با استفاده از زبان انگلیسی رایج ارتباط برقرار کند. معماری نرم افزاری ربات SHAKEY، بینایی رایانهای و روشهای برنامه ریزی و تعیین مسیر آن به عنوان مرجع اصلی در رباتیک، طراحی سرورهای وب، خودروها، بازیهای ویدیویی و مریخ نوردها به کار گرفته شده است.
پیوندها:
http://ieeemilestones.ethw.org/Milestone-Proposal:Shakey:_The_World%E2%80%99s_First_Mobile,_Intelligent_Robot,_197
مراجع ذکر شده در متن در پیوند زیر ارائه شدهاند:
مرجع: robohub


