یک عضو مصنوعی میتواند شکلی ثابت داشته باشد و با این وجود تا حدودی به کاربر آن برای ادامه زندگی کمک کند. اما این تنها کمک فناوری به افراد نیازمند این ادوات نیست. پژوهشگران بیومکانیک سعی در ساخت اعضایی دارند که به مانند اعضای بدن انسان رفتار کنند. این کار با کمک طراحی سامانهی کنترلکنندهی عضو ممکن است. برای آشنایی بیشتر با پژوهشهای انجام شده در این زمینه، در این نوشتار از مجلهی فناوریهای توان افزا و پوشیدنی صحبتهای یکی از فعالان ساخت اعضای مصنوعی هوشمند،پروفسور Helen Huang را با گزارشگر Robohub مرور خواهیم کرد.
اعضای مصنوعی هوشمند
تا ده سال پیش تعداد اعضای مصنوعی غیر منفعل انگشت شمار بود. امروزه دستگاههای دارای موتورهای فعال برای کمک به حرکت بیمار در حال گسترش هستند. این دستگاهها از یک منبع تغذیه برای فراهم آوردن انرژی لازم برای حرکت عضو مصنوعی استفاده میکنند. یکی از چالشهای ساخت این دستگاهها طراحی بخش کنترل دستگاه است. چنین دستگاهی به شکل خودکار حرکت میکند. به عبارت دیگر یک برنامهی رایانهای برای حرکت این دستگاه نوشته میشود. نوشتن این برنامه میتواند بسیار چالش برانگیز باشد. دستگاهی که به شکل خودکار بتواند خود را باحرکتهای کاربر تنظیم کند، میتواند مثالی از اعضای مصنوعی هوشمند باشد.
معرفی
پروفسور Helen Huang استاد دانشکدهی مهندسی پزشکی دانشگاههای North Carolina at Chapel Hill و North Carolina State یکی از پژوهشگران فعال در این عرصه است. وی در مصاحبهای با RoboHub از پژوهش بیرامون کارکرد پروتزهای منفعل پایین تنه و بالا تنه سخن گفت. این پژوهشگر و گروهش به طور خاص به نحوهی عملکرد رباتهای توانبخشی علاقمند هستند. این گروه عقیده دارند میتوان پروتزهای توانبخشی را برای هر بیمار به طور ویژه تنظیم کرد. این گروه به طور عمده از روشهای یادگیری ماشین به این منظور استفاده میکنند.
پروفسور Huang به طور عمده با پژوهشهای خود در پی افزایش کیفیت زندگی افراد بیمار به کمک فناوری است. بیماران منظور تا کنون شامل افرادی با نارساییهایی در ستون فقرات و بیمارانی با تجربهی سکته بودهاند. وی به طور عمده رباتهای توانبخشی را برای تسریع بهبودی این افراد گسترش میدهد. به عنوان یک پژوهشگر پسا دکتری وی بر روی اعضای مصنوعی بدن متمرکز شده است. این پژوهشها میتواند به افراد دارای نقص عضو کمک کند.
طراحی اعضای مصنوعی هوشمند
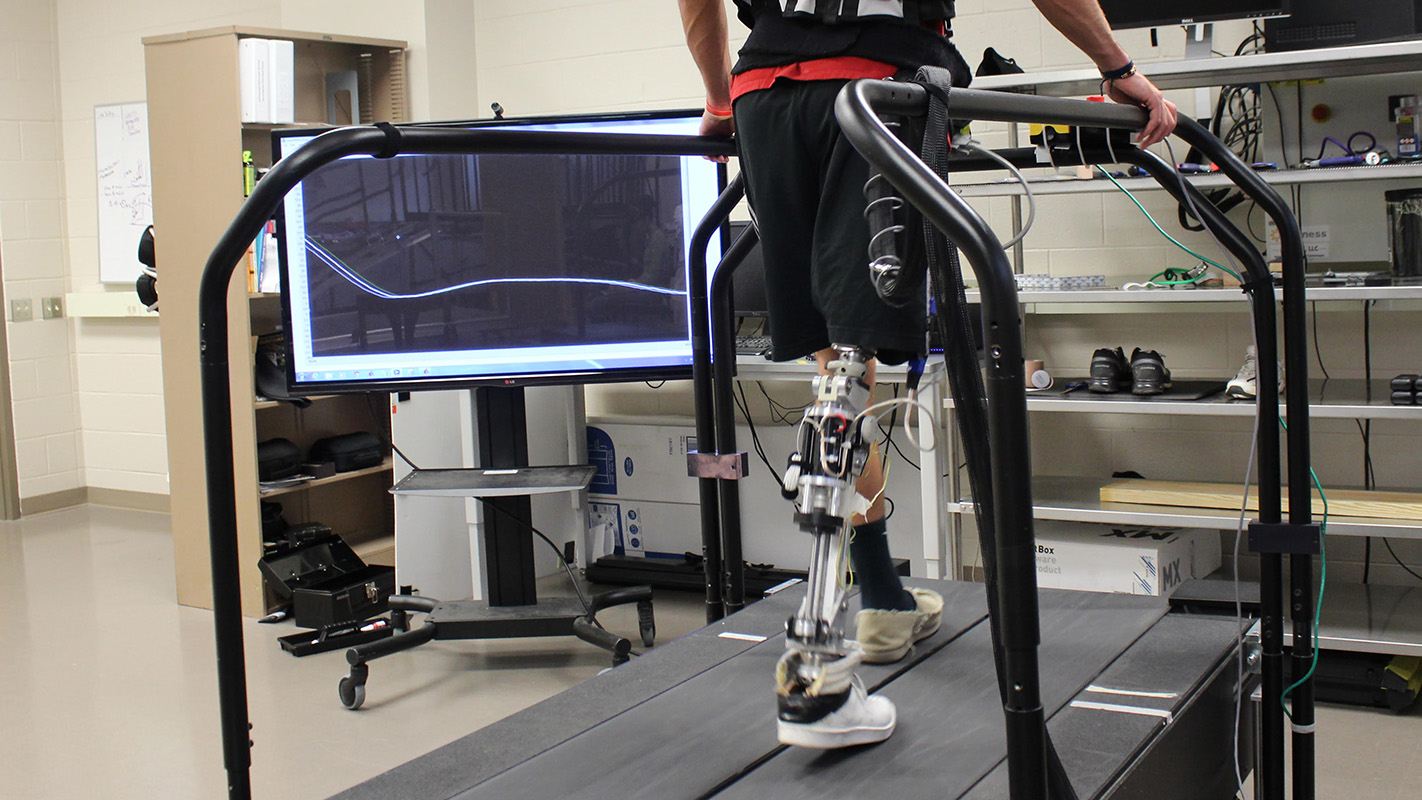
به طور کلی راه رفتن یک چرخهی مشخص دارد. این چرخه به هنگام راه رفتن تکرار میشود. چالش کنترل حرکت مربوط به زمانی است که اختلالی وارد این چرخه شود. تغییرات محیطی مانند پستی و بلندی راه و مشکلات ناشی از تغییرات آب و هوا میتواند فاکتورهای موثر در کنترل این چرخه را تغییر دهد. این فاکتورهای میتوان توان خروجی دستگاه در هر نقطه از عضو یا هر چیز موثر دیگر در کنترل حرکت باشد.
در حال حاضر پارامترهای کنترل کنندهی حرکت به صورت دستی توسط متخصص تعیین میشود. سپس کاربر عضو مصنوعی را به کار میگیرد. در صورتیکه استفاده از آن دشوار باشد پارامترها را تغییر میدهند. این آزمون و خطا به دفعات تکرار میشود تا زمانیکه کاربر با عضو دریافتی احساس راحتی کند.
معمولا کاربران پس از چند جلسه به کارکردن و کنترل عضو مصنوعی خود عادت میکنند. در این صورت کاربر میتواند سریعتر حرکت کند و با سرعت بیشتری آن را حرکت دهد. به دلیل اینکه پارامترهای موثر حرکت پیش از این برای حرکت آهستهتری طراحی شده بودند، کاربر باید برای تنظیم مجدد دستگاه به متخصص مراجعه نماید. یکی از چالشهای کار پروفسور Huang نوشتن برنامهی کنترل به شکلی است که بتواند به صورت خودکار با این تغییرات سازگار شود. به عبارت دیگر وی علاقمند به طراحی اعضای مصنوعی هوشمند است.
تنظیم اعضای مصنوعی هوشمند و یادگیری ماشین
پروفسور Huang به این مساله به شکل یک مساله کنترلی قابل حل با یادگیری ماشین نگاه میکند. ماشین با نگاه کردن به حرکات یک فرد عادی میآموزد که چگونه حرکتی مشابه خلق کند و هرگاه کاربر تمایل به قرار گیری در وضعیتی مشابه داشت، پارامترها را به صورت خودکار برای این حرکت جدید تنظیم میکند.
یکی از مشکلات این روش محدود بودن گزینههای آموزش دهندهی ماشین است.
در حال حاضر ماشین از متخصصهای سازندهی اعضای مصنوعی، کنترل پارامترها را میآموزد. هر متخصص پارامترها و ترجیحات خود را دارد. اما هیچ ارگانی این دادهها را به صورت منظم و در مقیاس بزرگ جمعآوری نمیکند لذا دسترسی به طیف گستردهای از این دادهها دشوار است.
یکی دیگر از روشها، استفاده از خود ماشین برای یادگیری است. ماشین پارامترها را تغییر میدهد. با این پارامترها رفتار انسان را در هنگام استفاده از عضو مصنوعی ارزیابی میکند. به طور مثال تعادل شخص و یا سرعت حرکت عضو مصنوعی را میسنجد. سپس پارامترها را دستهبندی میکند. یک دسته پارامتر میتواند به حرکت بی تعادل مرتبط باشد. دستهای دیگر به حرکت سریع و … . کاربر نیز میتواند با امتحان چندین سری پارامتر چیزی را که با آن احساس راحتی بیشتری میکند، انتخاب نماید. به عقیدهی پروفسور Huang این روش سریعتر و دقیقتر از سایر روشهای موجود خواهد بود.
چرا طراحی اعضای مصنوعی هوشمند دشوار است؟
برای توسعهی دستگاهها به طور معمول از افراد دارای نقص عضو کمک گرفته میشود. دستگاههای تنظیم شده به این روش تا کنون بازدهی منطقی و قابل مقایسه با کاربر معمولی داشتهاند. لذا این روش به نظر موفقیتآمیز میرسد. با این وجود تغییر رفتار بدن انسان، پدیدهای که به طور طبیعی رخ میدهد، میتواند در دراز مدت مشکل آفرین باشد. این امر ساخت وسیلهای را که یکبار برای همیشه برنامهنویسی شود چالش برانگیز میکند. اما این کار ناممکن به نظر نمیرسد.
سخن آخر
استفاده از یادگیری ماشین در تنظیم اعضای مصنوعی هنوز در حال توسعه است. کاربر استفاده کننده از این عضو تاثیر بسیار زیادی بر نحوهی تنظیم دستگاه خواهد داشت. بدیهی است که دستهای از مطالعات بیورباتیک در حال حاضر به تطابق متقابل انسان و ماشین اختصاص دارد. یکی دیگر از زمینههای فعال بیورباتیک امنیت است. ساخت دستگاهی هوشمند که با نحوهی حرکت کاربر هماهنگ باشد و ایمنی کافی داشته باشد میتواند دشوار باشد. ضمن اینکه ایمنی دستگاههای هوشنمد همواره محل بحث بوده است. چنین موضوعاتی میتوانند در آیندهی بیورباتیک تاثیر گذار باشند.
بیشتر بخوانید:
با Unlimbited آشنا شوید: دستهای سخاوتمندی که برای کودکان دست مصنوعی میسازند
الکترودهای مصنوعی حس لامسه را به فرد بازمیگرداند
منبع: RobohubPodcasts
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


