در یک پژوهش جدید تغییرات در زمانبندی بهینهی اعمال نیرو حین راه رفتن روی تردمیل با هدف کاهش هزینه متابولیک راه رفتن بررسی شد. نتایج این مطالعه نشان میدهد «کمک الهامگرفته از طبیعت» یا اعمال نیروی کمکی در مرحله گام برداشتن، همیشه برای بهبود راه رفتن انسان بهینه نیست. این مطالعه توسط دکتر Phillippe Malcolm در دانشگاه نبراسکا اوماها رهبری شد. آنها دریافتند که کمک کردن در مرحله ترمز میزان متابولیک شرکت کنندگان سالم را حین راه رفتن تا ۴۸ درصد کاهش میدهد. همچنین کمک در این مرحله میتواند هزینه متابولیک را در بیماران مبتلا به اختلال راه رفتن کاهش دهد. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
آسانتر کردن راه رفتن
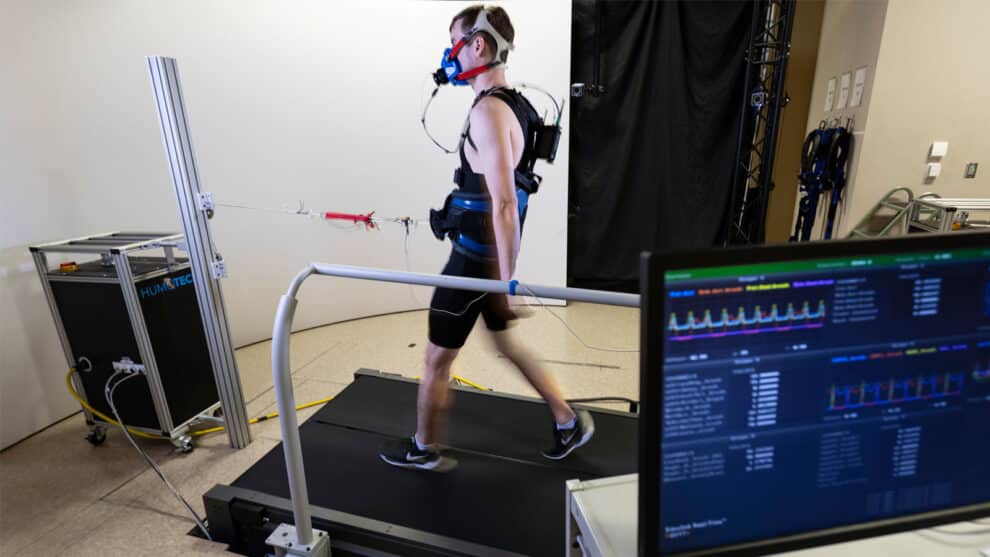
در پژوهشی که در دانشگاه نبراسکا اوماها انجام شد؛ کاربران با استفاده از شبیهساز HumoTech در زمانهای دقیق با استفاده از یک طناب کشیده شدند. کاربران یک جلیقه ویژه پوشیده بودند تا توزیع نیرو را بهبود بخشند. زمانی که راه میرویم، فاصله کوتاهی بین قدمها وجود دارد که در آن یک پا حرکت رو به جلو را متوقف میکند در حالی که پای دیگر در حال آماده شدن برای شتاب گرفتن و برداشتن گام بعدی به جلو است. نتایج پژوهشها نشان داد این پنجره کوتاه که در آن هر دو پا روی زمین هستند، بهترین زمان برای اعمال نیرو و کمک به راه رفتن مؤثر است.
نتایج این مطالعه با روشهای کمکی الهامگرفته از طبیعت متناقض است. کپی کردن مستقیم از طبیعت (بیومیمیکری) نشان میدهد اعمال یک نیروی کمکی زمانی که پا تلاش میکند به جلو حرکت کند، منجر به بزرگترین صرفهجویی در سوختوساز بدن میشود. Prokopios Antonellis، نخستین نویسنده این مطالعه و یک پژوهشگر فوق دکتری در دانشگاه بهداشت و علوم اورگان، این پژوهش را در طول دوره دکتری خود در دانشگاه نبراسکا اوماها انجام داد. Antonellis گفت: «اگرچه فعالسازی الهام گرفته از طبیعت میتواند مزایای ویژهای داشته باشد، مطالعه ما نشان میدهد که این لزوماً بهترین روش برای ارائه بیشترین کاهش هزینه متابولیک یا انرژی مصرف شده نیست. این یافته به جای تلاش برای پیشبینی روشهای بهینه الهامگرفته از بیومکانیک، تأکید بیشتری بر آزمایش بیومکانیکی دارد».

پیامدها
نتایج این مطالعه میتواند برای اسکلتهای بیرونی و رباتیک توانبخشی اعمال شود. جمعیتهای متعددی وجود دارند که میتوانند از تمرینهای پیادهروی سود ببرند، اما در انجام آن مشکل دارند. برای نمونه بیمارانی که شریانهایشان سخت شده و در نتیجه دچار درد پا و کاهش تحرک میشوند.
در یک مطالعه متفاوت که در دانشگاه میشیگان انجام شد، شرکتکنندگان اجازه داشتند زمانبندی و میزان نیروی کمکی را برای یک اسکلت بیرونی مچ پا انتخاب کنند. در آن مطالعه، زمانبندی ترجیحی کاربر نیز با زمان بیولوژیکی استفاده شده در اسکلتهای بیرونی مطابقت نداشت.
سطحی از پیچیدگی وجود دارد که بیان آن میتواند چالش برانگیز باشد. از نقطه نظر کنترل دقیق موتور به تنهایی، زمان اوج نیرو تنها یک متغیر است. افزون بر زمان اوج و بزرگی نیرو، یک منحنی نیرو (نرخ تغییر) وجود دارد. لایه دیگری از پیچیدگی این است که همه کنترلها نباید برای کاهش هزینه متابولیک حرکت بهینه شوند. برخی از روشهای کنترل اسکلت بیرونی میتوانند بر کاهش نیروهای فشاری روی ستون فقرات و نیروهای انقباضی در گروههای عضلانی خاص تمرکز کنند یا میتوانند برای راحتی و یکپارچگی بهینه شوند. صرف نظر از سطح پیچیدگی، شگفتانگیز است که ببینیم چگونه پژوهشها از «آیا اسکلتهای بیرونی هزینه متابولیک راه رفتن را کاهش میدهند؟» تغییر کرده است به «چگونگی بهینهسازی اعمال نیرو برای بهترین نتایج» در مدت تنها چند سال.
>> راهی شگفت انگیز برای تسهیل راه رفتن
>> روشی کاربرپسند برای تنظیم اسکلت بیرونی
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است»


