سالهاست که آزمایشگاه Biomechatronics در Stanford با شبیهساز اسکلت بیرونی خود خبرساز بوده است. این آزمایشگاه ربایتک با پوشیدنی خود به کاربران کمک میکند سریعتر و با تلاش کمتری راه بروند یا بدوند. اینک نخستین اسکلت بیرونی بدون مهار این آزمایشگاه توجه بسیاری را به خود جلب کرده است. این اسکلت بیرونی در مقالهای از Nature با جزئیات معرفی شده است. در ادامه این مقاله از مجله فناوریهای توانافزا و پوشیدنی به معرفی این اسکلت بیرونی میپردازیم.
این اسکلت بیرونی نوع پشتیبانی را برای کاربر شخصیسازی میکند. این کار در حین راه رفتن کاربر در دنیای واقعی انجام میشود. به گفته Steve Collins، دانشیار مهندسی مکانیک و سرپرست آزمایشگاه Biomenchatronics در استنفورد، نتیجه تمرین با این اسکلت بیرونی افزایش چشمگیر سرعت راه رفتن و صرف انرژی کمتر بوده است.
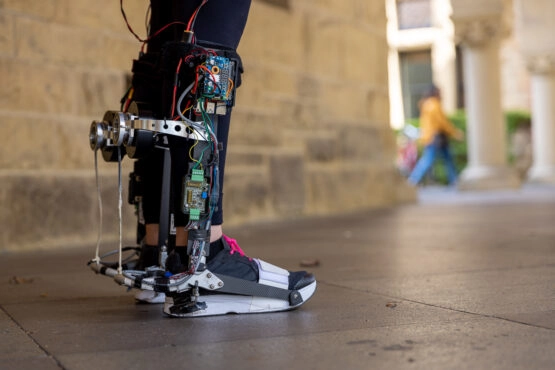
ویژگی های چکمه رباتیک Stanford
اسکلت بیرونی Stanford در واقع یک چکمه رباتیک با موتور است. این وسیله در هر گام کاربر را به جلو هل میدهد. اما برخلاف سایر اسکلتهای بیرونی این نیروی اضافه با الگوریتم یادگیری ماشین شخصیسازی میشود. این الگوریتم پس از سالها تجربه با شبیه ساز اسکلت بیرونی توسعه یافته است.
به گفته Patrick Slade، دانشجوی دکتری این اسکلت بیرونی روی تردمیل دوبرابر اسکلتهای بیرونی پیشین آزمایشگاه انرژی برای کاربر ذخیره میکند. در دنیای واقعی این واقعیت به معنای خستگی کمتر و سرعت بیشتر است.
هدف نهایی از ساخت این وسیله کمک به افراد کمتوان مانند کهنسالان است. با این وسیله آنان میتوانند طبق نیاز خود حرکت داشته باشند. این آخرین فناوری توسعه یافته امید تجاری سازی تا چند سال آینده را دارد.
به گفته یکی از فعالان این طرح با نام Ava Lakmazaher که این اسکلت بیرونی را آزمایش کرده است، در نخستین استفاده از این کفش رباتیک نیاز به تنظیم دستگاه حس میشود. اما پس از ۱۵ دقیقه راه رفتن با آن وسیله کاملا طبیعی جلوه میکند. راه رفتن با یک اسکلت بیرونی عملا مانند داشتن یک فنر زیر پاهاست. پس قدم برداشتن را واقعا راحت میکند.

یک اسکلت بیرونی برای محیط کنترل نشده خارج آزمایشگاه
به گفته Steve Collins مهمترین مانع ساخت یک اسکلت بیرونی موثر در گذشته شخصی سازی آن بوده است. بیشتر اسکلتهای بیرونی با تلفیقی از تقلیدزیستی(biomimicry) و شهود طراحی میشود. اما بدن انسان پیچیده و متنوع است و این ابزار برای همه خوب کار نمیکند.
به منظور رفع این مشکل این گروه از شبیهساز اسکلت برونی کمک گرفتند. این وسیله یک آزمایشگاه بزرگ، حجیم و ثابت است که میزان پشیتبانی وسیله را بررسی میکند. همچنین راهنمای استفاده از اسکلت بیرونی خارج آزمایشگاه نیز هست. دانشجویان و داوطلبان به این وسیله بسته میشوند. با حرکت آنان، شبیهساز میزان مصرف انرژی و کلیه اطلاعات حرکتی برای درک مشخصات راه رفتن را جمعآوری میکند.
این دادهها محاسن نسبی انواع مختلف پشتیبانی وسیله که توسط شبیهساز تامین میشد را به نمایش میگذاشت. همچنین یک مدل یادگیری ماشین که اسکلت بیرونی در دنیای واقعی به کار میبرد را برای شخصی سازی هر کاربر به کار میگیرد. بر خلاف شبیه ساز،این اسکلت بیرونی بدون مهار حرکات کاربر را با حسگرهای ارزان قیمت داخل چکمه دنبال میکند.
به ادعای طراحان ثبت علائم حرکتی مچ پا با کمک خود پوشیدنی پشتیبانی دستگاه را دقیقتر میکند. به این شکل میتوان دستگاه را دقیقا کنترل کرد. همزمان با راه رفتن افراد امکان پشتیبانی ایمن نیز فراهم میشود.
نیروی پیشران ۲۲۲ نیوتونی
اسکلت بیرونی راه رفتن را با اعمال یک گشتاور خارجی به قسمت مچ سهولت میبخشد. به این صورت برخی کارکردهای عضلات جایگزین میشود. با گام برداشتن کاربر، درست در زمانیکه پاها از زمین بلند میشود، دستگاه به کاربر کمک میکند پاها را به جلو براند.
در نخستین استفاده از اسکلت بیرونی، الگوی اعمال نیرو با حالت راحتی کاربر متفاوت است. مدل یادگیری ماشین با ارزیابی نتایج راه رفتن کاربر، مشخص میکند که چه میزان نیرو در استفاده بعدی کاربر نیاز است. شخصی سازی کامل دستگاه برای یک کاربر جدید تنها یک ساعت به طول میانجامد.
در آزمایشها پژوهشگران متوجه کارکرد فراتر از انتظار اسکلت بیرونی شدند. بنابر محاسبات طراحان، ذخیره انرژی و بهبود سرعت معادل کم کردن ۲۲۲ نیوتون از باری است که روی بدن کاربر وارد میشود. برای تصور بهتر توجه کنید که یک لپ تاپ تقریبا سنگین ۲ کیلوگرم است و ۲۰ نیوتون نیرو برای بلند کردن آن لازم دارید.
پشتیبانی بهینه به معنای ۹٪ سریعتر شدن گامها و ۱۷٪ صرف انرژی کمتر در شرایط مشابه راه رفتن، و بدون اسکلت بیرونی، است. این اعداد بزرگترین بهبود برای سرعت و انرژی اسکلت بیرونی است که تا امروز امکانپذیر بوده است. در مقایسه مستقیم، اسکلت بیرونی Standford روی تردمیل میتواند دو برابر سایر اسکلتهای بیرونی مصرف انرژی را کاهش دهد.
آینده چکمه رباتیک Stanford
گام بعدی در مورد این اسکلت بیرونی توجه به سایر کاربران است. کاربران مسن و افرادی که به هر علت کاهش حرکت بدنی را تجربه میکنند. پژوهشگران میخواهند تعادل و درد عضلات را بهبود بخشند. همچنین آنان امیدوارند کار با شرکای تجاری به عرضه دستگاه کمک کند.
این اسکلت بیرونی نخستین نمونه است که در آن پشتیبانی و کاهش مصرف انرژی بدنی برای کاربران در خارج آزمایشگاه میسر میشود. پژوهشگران بر این باورند که در دهه آینده این ایده در کنار اسکلت بیرونی قابل حمل به افراد زیادی کمک کند. افرادی که با مشکلات حرکتی دست و پنجه نرم میکنند. کاربرانی که برای فعال بودن با چالشهای حرکتی دست به گریبانند. افرادی که برای حفظ استقلال خود تلاش میکنند.
اینک ۲۰ سال است که این آزمایشگاه برای رسیدن به این هدف تلاش میکند. رسیدن به این نقطه رضایتبخش بوده است. توسعهدهندگان بر این باورند که فناوری آنان به افراد بسیاری کمک میکند.
نویسندگان و پژوهشگران طرح اسکلت بیرونی Stanford
Scott Delp استاد مهندسی پزشکی و مهندسی مکانیک در James H. Clark، و مدیر Wu Tsai Human Performance Alliance وعضو Stanford Bio-X، Maternal & Child Health Research Institute و Wu Tsai Neurosciences Institute
Steve Collins سرپرست آزمایشگاه Biomechatronics در Stanford و عضو Stanford Bio-X، Wu Tsai Human Performance Alliance، Wu Tsai Neurosciences Instituteوعضو موسسه هوش مصنوعی انسان محور(HAI)
Mykel Kochenderfer دانشیار هوافضا و فضانوردی، عضو Wu Tsai Human Performance Alliance وعضو Stanford Bio-X، Maternal & Child Health Research Institute و وابسته به HAI یا موسسه هوش مصنوعی انسان محور
اسکلت بیرونی برای پیاده روی در ژاپن
این منسوجات ترکیب شده با سلول های خورشیدی گوشی شما را شارژ میکنند
منبع: news.stanford
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


