پژوهشی که در Science Robotics به چاپ رسیده است در مورد نخستین عضلات مصنوعی پنوماتیک چاپ سه بعدی اطلاعاتی بدست میدهد. در این پژوهش عملگرهای مشابه هندسی با نام GRACE در کنار یکدیگر قرار میگیرند. تغییر شکل عملگرها انقباض و انبساط عضلات دست را ایجاد میکند. برای آشنایی بیشتر با جزئیات این طرح با مجله فناوریهای توان افزا و پوشیدنی همراه باشید.

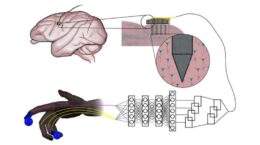
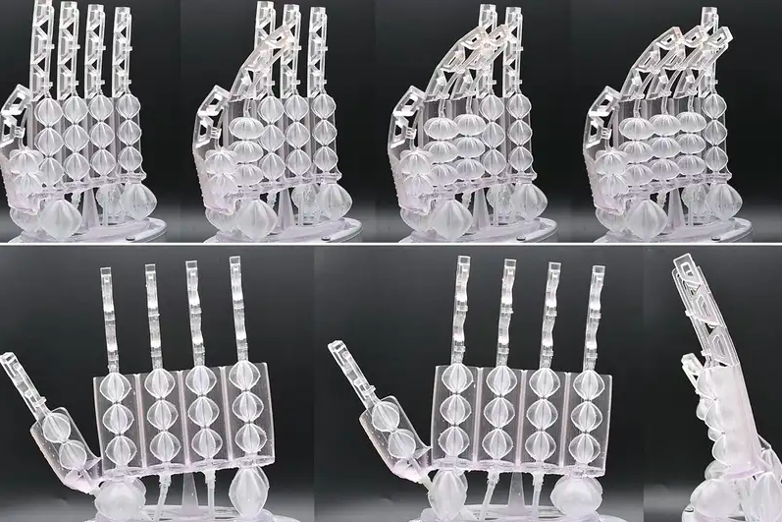
عضلات مصنوعی پنوماتیک چاپی ساختارهایی با قابلیت باز و جمع شدن در هنگام نیاز هستند. این طراحی نوآورانه از محرکهای GRACE توسط پژوهشگران موسسه فناوری ایتالیا(Istituto Italiano di Tecnologia یا IIT) در Genoa و Scuola Superiore Sant’Anna یا مدرسه مطالعات پیشرفته Sant Anna (SSSA) در پیزا انجام شده است. GRACE مخفف GeometRy-based Actuators able to Contract and Elongate است. هر GRACE یک عملگر است که با تغییر شکل هندسی باز و جمع میشود. از این پژوهش در Science Robotics و به عنوان دستگاهی با محرکهای تطبیقپذیر در مرحله پردهبرداری یاد شده است. یک دست پنوماتیک از هیجده GRACE مختلف ساخته شده است. همه اجزا با یکبار چاپ و با هم ساخته شدهاند.
ساخت عضلات مصنوعی هدفی جاهطلبانه است. ذات پیچیده عضلات طبیعی هر گونه شبیهسازی آن را دشوار میکند. بالاخص زمانی که توقع ایجاد حرکاتی نرم و انعطافپذیر، حرکاتی سریع و قدرتمند در کنار تغییرات ظریف در شکل ظاهری(مانند تغییرات ماهیچههای صورت) در نظر باشد. هر چند فیبرهای ماهیچهای تک تک تنها جمع میشوند، در صورتیکه پیکربندی خاصی برای آنان در نظر باشد تغییراتی مانند خمیدگی، پیچیدگی و حرکات شدید ممکن میشود.
ویژگی های دست مصنوعی ساخته شده با عضلات مصنوعی GRACE
این گروه پژوهشی کار خود را با عملگرهای پنوماتیک آغاز کردند. هر عملگر پنوماتیک میتواند با تغییر شکل هندسی پهن شود، کش بیاید و یا جمع شود. این اجزای هندسی در کنار هم واحدی را تشکیل میدهد که با چاپ سه بعدی قابل تولید است. GRACE های مختلف را میتوان با فرآیند چاپ سه بعدی کنار هم چاپ کرد تا یک سامانه واحد با قابلیت ایجاد حرکات مورد نظر تولید شود.
اندازه این عملگرها و دستگاه حاصل از ادغام آنها به فناوری تولید آن وابسته است. این اجزا را میتواند در اندازههای مختلف ساخت. همچنین امکان تولید آن با بازدههای مختلف به لحاظ کشش و کرنش وجود دارد.
پژوهشگران ویژگیهای هر GRACE را پس از چاپ به کمک یک چاپگر سه بعدی عادی به نمایش گذاشتند. ماده مورد استفاده رزین نرم است که هیجده GRACE مختلف با اندازه و شکلهای مختلف به کمک آن چاپ شده است. به این صورت با فشاری به اندازه چند دهم بار میتوان هر انگشت را خم کرد، مشت را جمع کرد و مچ را چرخانید. وزن این دست حدود ۱۰۰ گرم است. اندازه آن به اندازه دست طبیعی انسان است.
عملگرهای این دست وزنی ۱۰۰۰ برابر وزن خود را تحمل میکنند. کافیست ماده مناسب برای ساخت آن به کار رود. به عبارت دیگر نیرو و فشار تولیدی را میتوان با کاهش یا افزایش مواد دارای سختی بیشتر یا دستکاری در ضخامت پوسته تغییر داد.

کاربرد های GRACE
هر GRACE ویژگیهایی دارد که آن را برای کاربرد در دستگاههای مختلف رباتیک مناسب میسازد. سادگی ساخت این دستگاهها کپی برداری از آن را خارج آزمایشگاه هم ساده میسازد. به این شکل تجاری سازی این دستگاهها هم ساده است.
نتایج این پژوهش به عنوان بخشی از پژوهشهای انجام شده در European FET توسط Lucia Beccai و بخش از پژوهش رباتیک ملهم شده از ارگانهای زنده توسط Barbara Mazzolai در IIT و با همکاریبخش بیورباتیک SSSA منتشر شده است.
اسکلت بیرونی در صنایع غذایی
ربات کمکی MRBA برای تشخیص و جلوگیری از سقوط
منبع: opentalk.iit.it
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»