حسگر فشار مقاوم و منعطف نویدبخش فناوری های رباتیک نرم
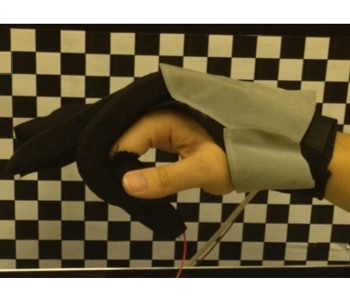
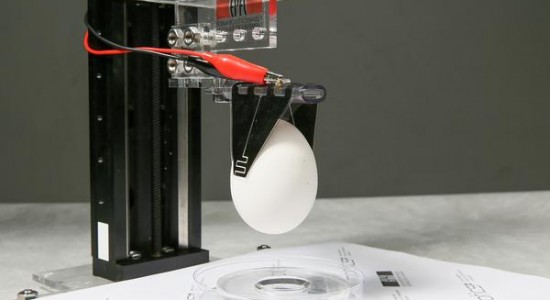
به تازگی پژوهشگران دانشکده مهندسی و علوم کاربردی دانشگاه هاروارد (SEAS) و موسسه Wyss حسگر فشار مقاوم و بسیار حساسی توسعه دادهاند که در منسوجات و سامانههای رباتیکی نرم قابل استفاده است. چنین حسگری کاربردهای بسیاری دارد از شبیهسازیهای واقعیت مجازی و لباسهای ورزشی هوشمند تا تشخیص بیماریهای نورودژنراتیو (Neurodegenerative) همچون پارکینسون. با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید. بیماری های نورودژنراتیو (NDD) طیف گسترده ای از بیماری ها هستند که…