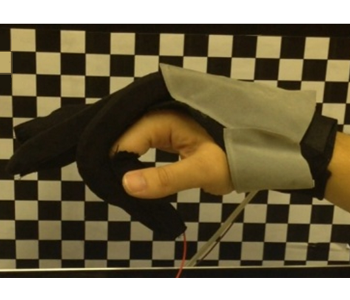
 پژوهشگران سنگاپوری یک محرک با قابلیت سنجش فشار را توسعه دادهاند که دارای پتانسیل بکارگیری در دستگاههای تشخیصی و توانبخشی برای حرکت و چابکی بیماران است. این محرک با ترکیب یک حسگر فشار با محرکی که حرکات آن با هوا کنترل میشود و بکارگیری آن درون یک دستگاه رباتیک منعطف، هم میتواند تحرک بیمار را آزمایش کرده و هم به عنوان بخشی از فیزیوتراپی توانبخشی به تحرک بیمار کمک کند. در این تصویر یک دستگاه پیشنمونه به فرم یک دستکش حسگر- محرک مقاوم و منعطف برای تشخیص و کمک به حرکت انگشتان نمایش داده شده است.
پژوهشگران سنگاپوری یک محرک با قابلیت سنجش فشار را توسعه دادهاند که دارای پتانسیل بکارگیری در دستگاههای تشخیصی و توانبخشی برای حرکت و چابکی بیماران است. این محرک با ترکیب یک حسگر فشار با محرکی که حرکات آن با هوا کنترل میشود و بکارگیری آن درون یک دستگاه رباتیک منعطف، هم میتواند تحرک بیمار را آزمایش کرده و هم به عنوان بخشی از فیزیوتراپی توانبخشی به تحرک بیمار کمک کند. در این تصویر یک دستگاه پیشنمونه به فرم یک دستکش حسگر- محرک مقاوم و منعطف برای تشخیص و کمک به حرکت انگشتان نمایش داده شده است.
اندازۀ کوچک و انعطافپذیری از برتریهای این دستکش رباتیک منعطف نسبت به دستگاههای توانبخشی رباتیک دست سنتی است چرا که دستگاههای موجود معمولاً بزرگ، سخت و آزاردهنده هستند. ساخت این حسگر-محرک آسان است و حتی هنگام جابجایی بالا، حساسیت بسیار خوبی دارد.
با بکارگیری این دستکش حسگر-محرک، پژوهشگران قادر بودند انگشت سبابه را وادار به خم شدن کرده و همزمان میزان خم شدن آن را اندازهگیری کنند. خم کردنهای کمکی دورهای تکرارپذیری بسیار عالی در سیگنال حسگر را نشان داد. افزون بر خم کردن کمکی، پژوهشگران تغییر شکل حسگر در زمان خم شدن عادی انگشت را نیز اندازه گرفتند. تحت شرایط عادی، خم شدن داوطلبانه انگشت سیگنال قویتری ایجاد کرد چرا که میزان خم شدن انگشت نسبت به زمانی که توسط محرک وادار به خم شدن میشود بیشتر است. این مورد دستگاه را قادر میسازد برای تعیین میزان سفتی انگشت بکار رود که میتواند در تعیین میزان چابکی بیماران سکتۀ مغزی و چندین شرایط دیگر موثر بر تحرک و چابکی مفید باشد.
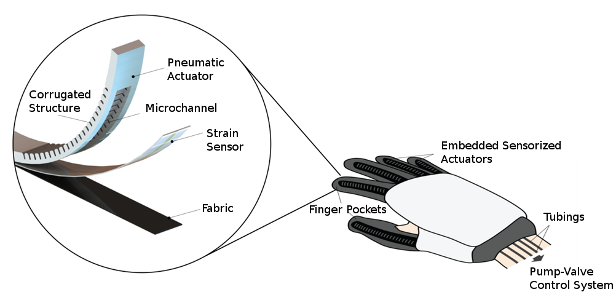
این دستکش رباتیک منعطف از یک محرک بادی منعطف ساخته شده از قالبهای لاستیک سیلیکون تشکیل شده است که برای ایجاد بستری برای حسگر، ثابت شدهاند. محرک بادی شامل یک شکاف هوا در امتداد طول آن است و ساختار راه راه این محرک به آن اجازه میدهد تحت فشار هوای بالا درون شکاف خم شود. این حسگر با چاپ جوهر رسانای ذرات نقره روی بستری از جنس سیلیکون الاستومر ساخته شده است.
میتوانید مقالۀ مرتبط با این دستکش رباتیک منعطف را از اینجا بخوانید.
منبع: materialsviews