پژوهشگران مؤسسه فناوری شیبورا (Shibaura) در ژاپن یک الگوریتم کنترلی برای رباتهای توانبخشی ابداع کردهاند که از حرکت طبیعی آنها در جلسات توانبخشی اطمینان حاصل میکند. این سامانه کنترلی زوایایی را که مفاصل بازوی انسان هنگام انجام فعالیتهای مختلف ایجاد میکند، محاسبه و اجازه نمیدهد ربات سعی کند مفاصل را به صورت غیرطبیعی خم کند. این الگوریتم پیچیدگی و حجم محاسبات مورد نیاز برای اطمینان از حرکات ایمن و قابل قبول برای چنین رباتهایی را کاهش میدهد. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.

توانبخشی پس از سکته
سکته مغزی یکی از نگرانیهای اصلی در کشورهایی با جمعیت سالخورده مانند ژاپن است؛ جایی که خطر سکته مغزی در افراد میانسال ۲۰ درصد است. سکته مغزی یکی از علل اصلی از دست دادن و ناتوانی عملکرد حرکتی است. توانبخشی مناسب میتواند به بازگرداندن عملکرد مناطق آسیب دیده کمک کند، اما توانبخشی هزینهبر و زمانبر است. هر جلسه توانبخشی نیاز به چندین درمانگر آموزش دیده برای یک بیمار دارد. توانبخشی رباتیک راهکاری برای این موضوع ارائه میدهد.
فناوری توانبخشی در حال پیشرفت است و ممکن است به زودی مجموعهای از سامانهها برای کمک به درمانگران و انجام راحتتر توانبخشی در دسترس باشد. یکی از این دستگاهها ربات توانبخشی است که میتواند حرکت بازوی افراد را راهنمایی و به آن کمک کند.
با این حال مهم است که چنین رباتهایی به طور قابل پیشبینی و ایمن عمل کنند. حرکت دادن غیر طبیعی بازو میتواند موجب ناراحتی یا حتی صدمه شود، به ویژه در افرادی که دچار محدودیت حرکتی هستند. بازو دارای مفصل مچ، مفصل آرنج و مفصل شانه است و این مفاصل با زاویههای ویژه، حرکتی مانند برداشتن یک جسم را انجام میدهند.
محاسبه زوایای مفاصل
در حال حاضر بیشتر الگوریتمهای کنترلی برای چنین دستگاههایی به موقعیت نهایی بازو پس از انجام یک کار خاص نگاه میکنند و سپس جهت محاسبه زوایای مورد نیاز مفصل برای دستیابی به این هدف، به عقب برمیگردند. ریاضیات پشت چنین محاسباتی بسیار پیچیده است و زوایای محاسبه شده ممکن است برای بدن انسان غیرطبیعی باشد. تا به امروز الگوریتمهای کنترلی این مورد را در نظر نمیگرفتند که آیا زوایای مفصلی ربات برای مفاصل انسان امکانپذیر و طبیعی است یا خیر.
آخرین شاهکار ریاضی، که Pro-ISADE نامیده میشود، امکانسنجی حرکات بازوی انسان را محاسبه میکند. از آنجا که تعداد حرکات مجاز کم است، سرعت محاسبات الگوریتم بیشتر میشود. مزیت این الگوریتم پیشنهادی کاهش پیچیدگی و حجم محاسبات در مقایسه با روشهای دیگر است.
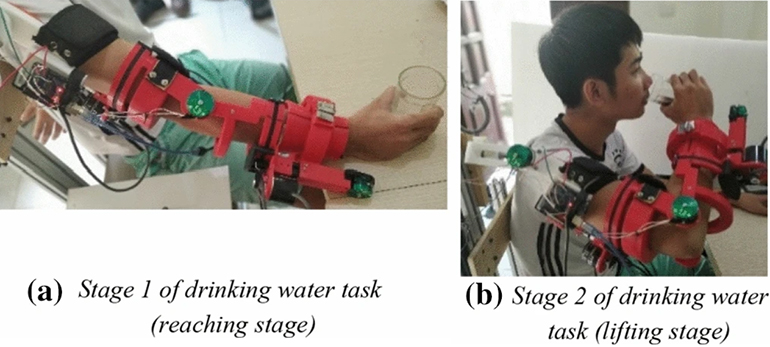
بنابراین، الگوریتم Pro-ISADE یک ابزار عالی برای رباتهای توانبخشی است، جایی که تقلید از حرکت طبیعی بدن انسان برای جلوگیری از آسیب به بیماران ضروری است. تاکنون، پژوهشگران ژاپنی این الگوریتم را برای انجام دو فعالیت ضروری زندگی روزمره، یعنی نوشیدن یک لیوان آب و مسواک زدن دندانها آموزش دادهاند. Tam Bui، پژوهشگر شرکت کننده در این مطالعه گفت: «توانبخشی با کمک ربات امکان تمرینات با شدت بیشتر، مدت زمان طولانی و تکرار بیشتر را فراهم میکند. رباتهای توانبخشی اندام فوقانی میتوانند به بیماران مبتلا به سکته مغزی کمک کنند تا به سرعت وارد زندگی روزمره خود شوند».
بیشتر بخوانیم:
>> یک اسکلت بیرونی برای کمک به حرکت شانه و دست: Abilitech Assist
>> GripAble و توانبخشی دست پس از سکته مغزی در خانه
منبع: medgadget.com
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است»


