بیماران هنگام آموزش برای بازیابی حرکات پس از سکته مغزی یا آسیب نخاعی، باید مجدداً یاد بگیرند که چگونه تعادل خود را حین راه رفتن حفظ کنند. روشهای بالینی فعلی از وزن بیمار در طول حرکات حمایت میکند اما تعادل بدن را تنظیم نمیکند. گروهی از پژوهشگران برای کاهش محدودیتهای روشهای فعلی، یک مکانیزم تعلیق وزن چند جهته را توسعه دادهاند. این سامانه از بیماران نه تنها در حالت ایستاده بلکه در حرکت رو به جلو نیز پشتیبانی میکند. این حمایت به بیمار اجازه میدهد تا به صورت طبیعی و راحت راه برود، بدن را آموزش میدهد تا با گرانش مقابله کند و حین راه رفتن در حالت طبیعی قرار گیرد. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
بیماران هنگام آموزش برای بازیابی حرکات پس از سکته مغزی یا آسیب نخاعی (SCI)، باید مجدداً یاد بگیرند که چگونه تعادل خود را حین راه رفتن حفظ کنند. روشهای بالینی فعلی از وزن بیمار در طول حرکات حمایت میکند اما تعادل بدن را تنظیم نمیکند. این بدان معنی است که وقتی بیماران آماده راه رفتن بدون کمکهای مکانیکی میشوند، ممکن است برای آنها دشوار باشد که تعادل بدن خود را حفظ کنند. این مسئله در یک مقاله در Science Translational Medicine توسط گروهی با رهبری Courtine-Lab و همکاری آزمایشگاه Ijspeert، NCCR Robotics و EPFL مطرح شده است.
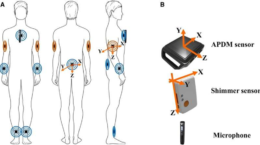
طی راه رفتن ترکیبی از نیروها بدن انسان را به جلو حرکت میدهد. در واقع، تعامل پاها با زمین بیشترین نیروی پیشرو را ایجاد میکند. اما با هر قدم عضلات متعددی در بدن برای حفظ حرکت و جلوگیری از سقوط درگیر میشوند. برای اینکه بیمار به طور کامل توانایی راه رفتن را دوباره به دست آورد باید هم عضلات و هم مسیرهای عصبی مورد نیاز برای این حرکات را توسعه دهد.
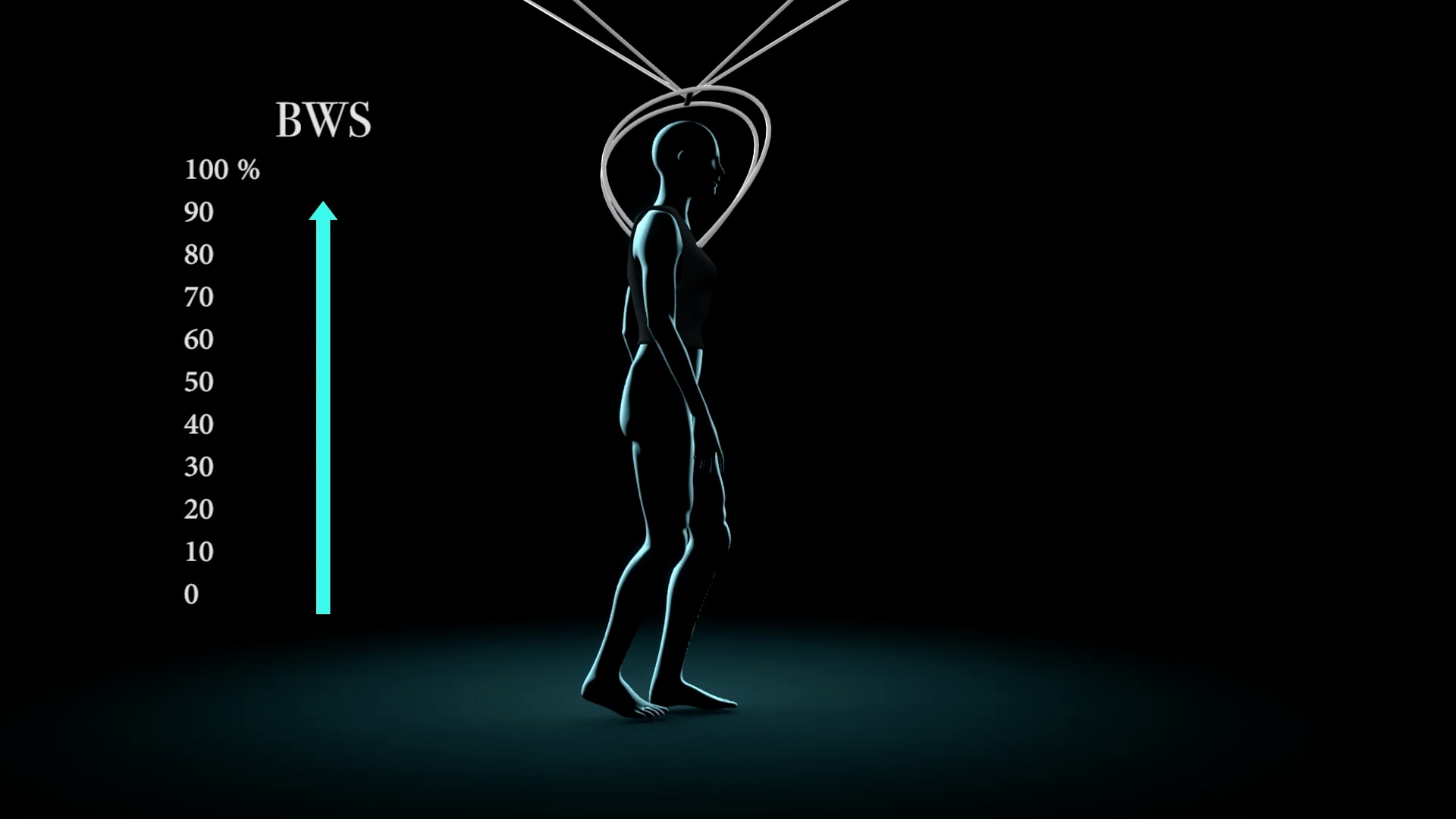
در حین درمان که یک سامانه رباتیک از وزن بدن حمایت میکند، بیمار صرفاً به سمت بالا کشیده میشود، بدون حمایت از حرکات رو به جلو یا به طرفین. در صورتی که فرد همراه با حرکت سامانه حمایتی به طور گسترده جابجا میشود. در حقیقت، کسانی که در سامانه آموزشی قرار دارند از گامهای کوتاهتر، حرکات آهستهتر و چرخش کمتر بدن نسبت به کسانی که در حال انجام پیادهروی هستند، استفاده میکنند.
این گروه در تلاش برای کاهش محدودیتهای روشهای فعلی درمان، یک مکانیزم تعلیق وزن چند جهته را توسعه داده است. به این معنی که سامانه از بیماران نه تنها در حالت ایستاده بلکه در حرکت رو به جلو نیز پشتیبانی میکند. این حمایت به بیمار اجازه میدهد تا به صورت طبیعی و راحت راه برود، بدن را آموزش میدهد تا با گرانش مقابله کند و حین راه رفتن در حالت طبیعی قرار گیرد.
این گروه یک سامانه، RYSEN، را ایجاد کرد که به بیماران اجازه میدهد طیف وسیعی از فعالیتها، از ایستادن و راه رفتن تا راه رفتن روی یک نردبان افقی که بر روی زمین قرار میگیرد، را انجام دهد. همچنین آنها الگوریتمی ایجاد کردهاند که نحوه راه رفتن بیمار را اندازهگیری میکند و پشتیبانی از آنها را همزمان با تکمیل آموزش به روز میکند. گروه متوجه شد که با تنظیم نیروهای رو به بالا و رو به جلو در طول تمرین، تقریباً همه افراد پیشرفت قابل توجهی در حرکت داشتند. در حقیقت بیمارانی که پس از SCI و سکته مغزی معلولیت را تجربه کردهاند درمییابند که با استفاده از این سامانه قادر به راه رفتن هستند، بنابراین شروع به بازسازی عضلات و مسیرهای عصبی میکنند.
این کار در یک چارچوب بزرگتر در NCCR Robotics وجود دارد که در آن پژوهشگران از فناوریهای حمایت از وزن استفاده میکنند تا نقش کلیدی در آزمایشهای بالینی تحریک الکتریکی نخاع ایفا کنند. هدف نهایی آنها ایجاد فناوریهایی است که آسیب نخاعی و سکته مغزی را بهبود میبخشد.
بیشتر بخوانید:
>>رابط مغز و رایانه راهی برای بازیابی حسی و حرکتی بیماران آسیب نخاعی و مغزی
>>بازیابی حرکتی اندامهای بیماران قطع نخاعی با آرایه الکترودی USEA
منبع: robohub
استفاده و بازنشر این نوشتار تنها با ذکر منبع و نام «مجلهی فناوریهای توان افزا و پوشیدنی» مجاز است.