امروزه بسیاری از رباتهای انساننمای پیشرفته میتوانند بر سطح هموار و سطح شیبدار راه بروند، از پلهها بالا و پایین بروند، از سطح ناهموار عبور کنند و برخی حتی میتوانند پرش کنند. با وجود پیشرفتهای بسیار، رباتهای دوپا هنوز چابکی و کیفیت عملکرد انسان و حیوانات را ندارند. مهندسان رباتیک در تلاش هستند رباتی دوپا توسعه دهند که در راه رفتن، توانایی انسان و حیوانات را داشته باشد. ما میتوانیم در مسیرهای باریک راه برویم، از موانع مسیر عبور کنیم و از پله بالا برویم اما رباتهای چرخدار توانایی و دقت حرکت ما را ندارند. از سوی دیگر، رباتهای دوپا که همانند سیستم بدن انسان دارای زانو، مفصل و مچ پا هستند از نظر ظاهری مشابه انسان هستند اما در عملکرد تفاوت دارند. برای آشنایی با نسل جدید رباتهای دوپا با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.
چرا عملکرد رباتها در راه رفتن هنوز فاصلهی بسیاری با حیوانات و انسان دارد؟
رباتها به طور معمول در مسیرهای از پیش مشخص شده با دقت بالایی حرکت میکنند اما در مسیرهای ناشناس و غیرمنتظره انعطافپذیری و سازگاری لازم را ندارند. تعدادی از گروههای پژوهشی رباتیک در حال ساخت رباتی هستند که انعطافپذیری بیشتری داشته باشد و همانند انسان در محیطهای پویا حرکت کند. یکی از رباتهای معروف که چنین ویژگی دارد، ربات انساننمای اطلس (Atlas) ساخت شرکت بوستون داینامیکس (Boston Dynamics) است. ربات اطلس بر سطح نرم و سخت راه میرود، پرش میکند و حتی پشتک میزند. با این وجود، با مقایسهی پیشرفتهترین رباتهای دوپا با راه رفتن حیوانات و انسان، رباتها به راحتی شکست میخورند.
با وجود فناوریهای پیشرفته، همچنان راه رفتن رباتها با حیوانات و انسان فاصلهی بسیاری دارد. میتوان گفت فناوری مانع پیشرفت رباتهای دوپا نیست. موتورهای به کار رفته در رباتها به اندازهی کافی قدرتمند ساخته میشوند. مواد به کار رفته در رباتها از نظر قدرت و کیفیت خوب هستند، بخشهای رایانهای رباتها نیز به اندازهی کافی سریع هستند. شاید بزرگترین مانع پیشرفت رباتهای دوپا، درک ما از چگونگی عملکرد سامانهی حرکتی دو پا باشد.
رباتهای Cassie و Digit چشمانداز روشن طراحی رباتهای دوپا

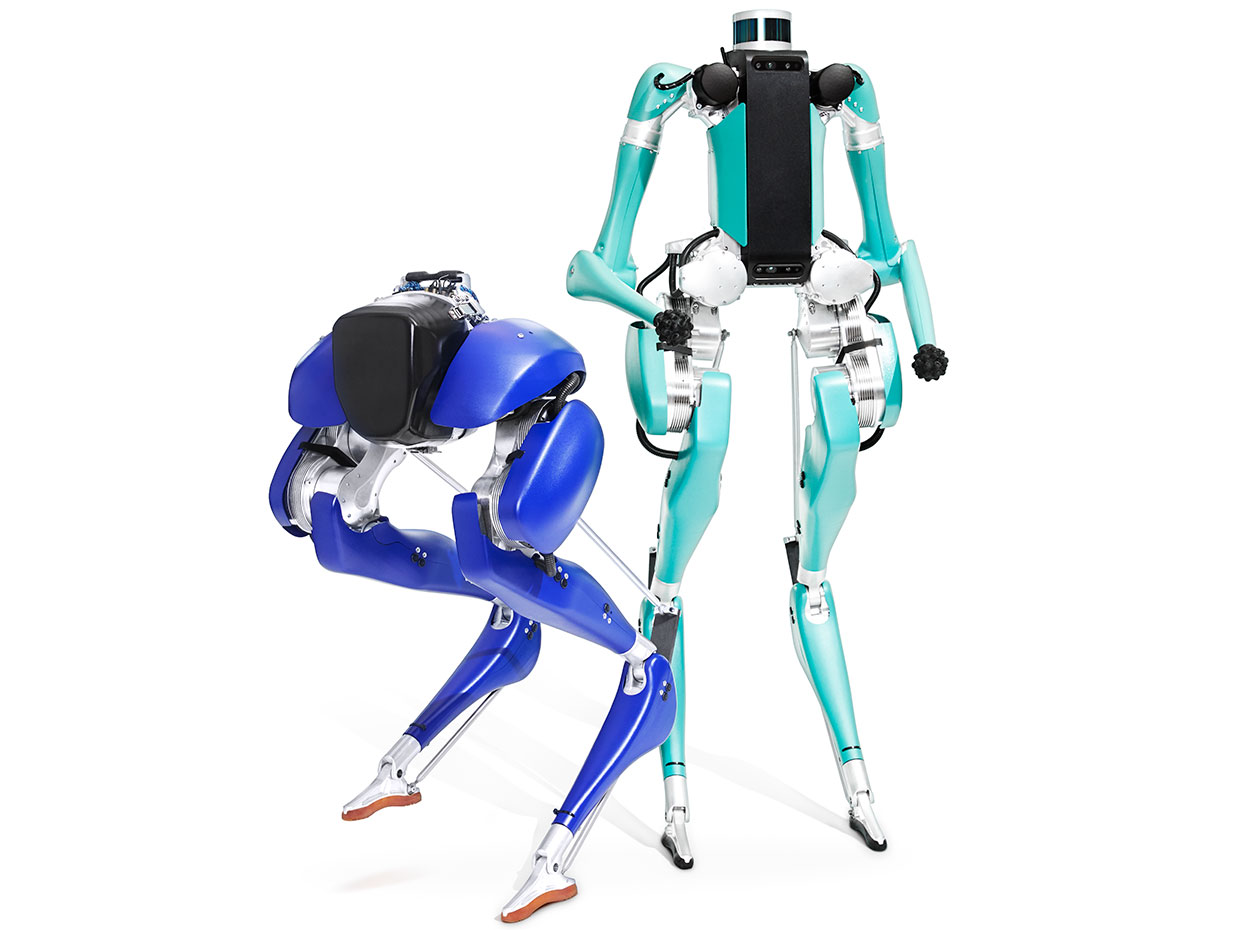
شرکت رباتیک Agility Robotics با هدف افزایش انعطافپذیری و سازگاری حرکت رباتها در دنیای واقعی، رباتهای دوپای Cassie و Digit را طراحی کرده است. در آزمایشگاه Dynamic Robotics دانشگاه ایالتی اورگن (Oregon State University)، جاناتان هرست (Jonathan Hurst) و گروهی از پژوهشگران به دنبال شناسایی اصول پایه حرکت با دوپا و در نتیجه به کارگیری نتایج پژوهش در ساخت رباتهای دوپا هستند. جاناتان هرست، استاد مهندسی مکانیک و رباتیک دانشگاه اورگن و مدیر ارشد فناوری شرکت رباتیک Agility Robotics است. این شرکت بر کاربرد تجاری رباتهای دوپا تمرکز دارد. در سال ۲۰۱۷، استارتاپ Agility Robotics از ربات Cassie رونمایی کرد.
هماکنون گروه Agility Robotics در حال توسعهی ربات جدید Digit هستند. این ربات ساختاری مشابه ربات Cassie دارد با این تفاوت که دارای دو بازو و تعدادی حسگر با دقت بسیار است. این ویژگیها به پایداری و ثبات حرکت ربات کمک میکند. همکاری آزمایشگاه رباتیک Dynamic Robotics و شرکت Agility Robotics در ساخت رباتهای دوپا که همانند انسان به هر کجا بخواهند بروند، آیندهی روشن علم رباتیک را نشان میدهد. جاناتان هرست بر این باور است که در آینده رباتهای دوپا در مراقبت افراد سالمند کمک خواهند کرد. در زلزله و آتشسوزی جان افراد را نجات خواهند داد و آنچه که ما نیاز داریم به در خانهها میآورند. همچنین فناوری رباتهای دوپا در ساخت اسکلتهای بیرونی و اندام پروتز فعال برای افراد ناتوان حرکتی به کار خواهد رفت. در آینده، رباتهای دوپای داستانهای علمیتخیلی به دنیای واقعی وارد خواهند شد.
ساخت رباتهای دوپا با الهام از پرندگان
برخی از پرندگان در دویدن توانایی بیشتری نسبت به پرواز کردن دارند. پرندگانی مانند شترمرغ، بوقلمون، مرغ شاخدار (guinea fowl) و بلدرچین در این دسته قرار میگیرند و میتوانند با سرعت بدوند. گروه پژوهشی جاناتان هرست با همکاری مونیکا دالی (Monica Daley) از کالج سلطنتی دامپزشکی دانشگاه لندن، چگونگی راه رفتن و دویدن پرندگان را مطالعه میکنند. اگر تنها بر ساخت ربات تمرکز شود و پس از آن با الگوریتمهای نرمافزاری و کنترل نرمافزاری بخواهیم چابکی و ثبات را برای ربات فراهم کنیم پروژه با شکست روبرو خواهد شد. کنترل نرمافزاری ربات باید در کنار ویژگیهای مکانیکی و به اصطلاح passive dynamics همانند یک سامانهی هماهنگ و یکپارچه در نظر گرفته شود تا شانس موفقیت ساخت یک ربات با عملکردی مشابه حیوانات افزایش یابد.
برای طراحی ربات دوپا همچون Cassie و Digit از فیزیک حرکتی پرندگان در هنگام راه رفتن و دویدن الهام گرفته شده است و مدل ریاضی متناسب با آن استخراج شده تا با شبیهسازی در رایانه بتوان آن را در ساخت رباتهای دوپا به کار برد. یکی از سادهترین مدلهای ریاضی که در رباتهای دوپا به کار میرود مدل جرم و فنر (spring-mass model) شامل یک جرم نقطهای (point mass) متصل به یک جفت فنر است. مرکز جرم در ربات دوپا، اندام فوقانی و بازوها هستند و یک جفت فنر نیز پاهای ربات هستند.
ربات دوپا ATRIAS نخستین ربات ساخت آزمایشگاه Dynamic Robotics

ربات ATRIAS از نظر ظاهری شبیه انسان نیست اما سامانهی حرکتی مشابه انسان دارد. این ربات با همکاری گروه پژوهشی جاناتان در دانشگاه ایالتی اورگن و هارتموت گایر (Hartmut Geyer) استاد دانشگاه کارنگی ملون (Carnegie Mellon University) و جسی گریزل (Jessy Grizzle) استاد دانشگاه میشیگان طراحی شده است. پاهای ربات از میلههای سبک فیبر کربن ساخته شده است تا وزن پاها کاهش یابد.
تصور کنید با چشمان بسته و با استفاده از چوبهای بلند در حالیکه دستهای شما بسته شده است بخواهید راه بروید. شما بدون حرکت دستها در راه رفتن تعادل نخواهید داشت. تنها راه برقراری تعادل گام برداشتن پیوسته است. این دقیقا کاری است که ربات ATRIAS انجام میدهد. این ربات حتی با وجود موانع در مسیر حرکتش، تعادل خود را در راه رفتن حفظ میکند.
یکی دیگر از نکاتی که در طراحی ربات باید درنظر گرفته شود پارامتر به صرفه بودن انرژی مصرفی ربات است. برای مقایسه بازده انرژی مصرفی رباتها و انسان و حیوانات از معیار هزینه حمل (cost of transport) استفاده میشود. هزینهی حمل (COT)، مقدار انرژی مصرفی در طول یک قدم کامل وسیله حرکتی یا انسان و حیوان است که با نسبت انرژی مصرفی بر حاصلضرب وزن در سرعت به دست میآید. هرچه COT کمتر باشد بازدهی انرژی بهتر است. برای نمونه هزینهی حمل انسان حدود ۰٫۲ است در حالیکه مقدار COT برای رباتهای دوپا قدیمی بین محدوده ۲ تا ۳ تخمین زده شده است. هزینهی حمل ربات ATRIAS برابر با ۱٫۱۳ است که برتری این ربات در بهرهوری انرژی را نسبت به رباتهای دوپای قدیمی نشان میدهد. برای تامین انرژی ربات ATRIAS از باتریهای لیتیوم پلیمری که در ماشینهای کنترلی کاربرد دارد، استفاده شده است.
همچنین معیار نیروی واکنش زمین (Ground Reaction Force) مقدار نیرویی که ربات بر زمین اعمال میکند نیز اندازهگیری شده است. این ویژگی با کمک دستگاه اندازهگیری نیرو (force plate) که برای ارزیابی نیروی اعمالی از سوی ورزشکار بر زمین در هنگام ایستادن یا راه رفتن به کار میرود اندازهگیری میشود. ربات ATRIAS دارای وزنی برابر با ۷۲٫۵ کیلوگرم است. در حالی که ربات بر دستگاه force plate راه میرود، اطلاعات نیروی اعمالی ثبت میشود. با مقایسهی دادههای GRF ربات ATRIAS با انسان مشخص شد الگوی حرکتی ربات شباهت بسیاری با انسان دارد. ATRIAS نخستین رباتی است که الگوی حرکتی و سیستم حرکتی انسان را به خوبی تقلید میکند.
نتایج نشان داد که مدل جرم و فنر برای طراحی رباتهای دوپا بسیار کاربردی است. با به کارگیری این مدل، ویژگیهای چابکی، ثبات و پایداری و بهرهوری انرژی به طور همزمان به دست میآید و سامانهی حرکتی پا مدلسازی میشود.
در همین زمینه بخوانیم:
>>مروری بر تازه ترین ربات های توسعه یافته
منبع: spectrum.ieee
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»


