برای افراد مبتلا به قطع عضو که از اندامهای مصنوعی استفاده میکنند، یکی از بزرگترین چالشها کنترل پروتز است. بیشتر اندامهای مصنوعی با استفاده از الکترومیوگرافی، روشی برای ثبت فعالیت الکتریکی ماهیچهها، کنترل میشوند اما این روش کنترل محدودی روی پروتز دارد.
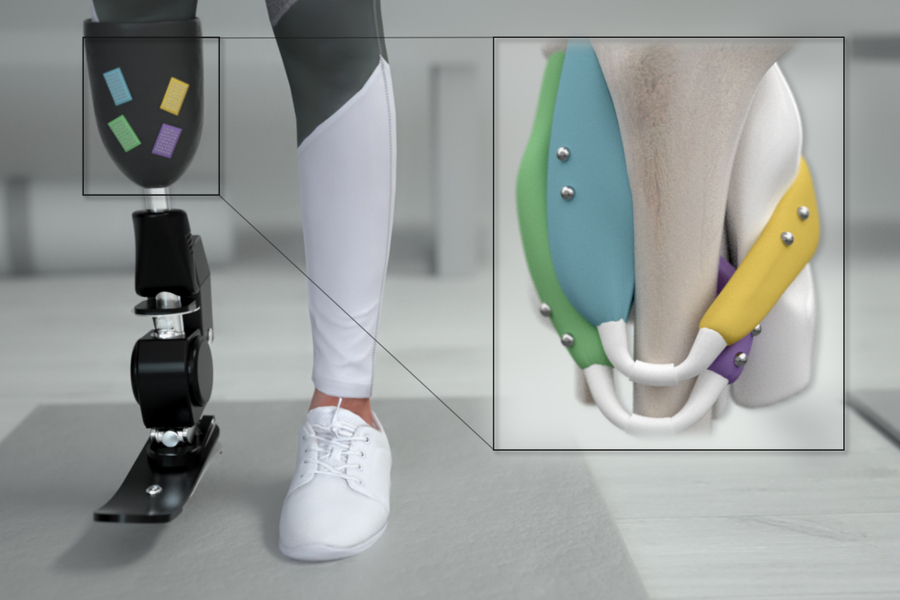
اکنون پژوهشگران آزمایشگاه رسانهای MIT رویکرد جایگزینی توسعه دادهاند که به اعتقاد آنها میتواند کنترل بسیار دقیقتری بر اندامهای مصنوعی ارائه دهد. پس از قرار دادن مهرههای مغناطیسی کوچک در بافت ماهیچهای باقیمانده، میتوان طول ماهیچه را هنگام انقباض به طور دقیق اندازه گرفت و این بازخورد را در کسری از ثانیه به پروتز بیونیک منتقل کرد. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
در مطالعه جدیدی که در Science Robotics منتشر شد، پژوهشگران روش جدید خود با نام مغناطیس سنجی (magnetomicrometry یا MM) را آزمایش کردند و نشان دادند که این روش میتواند با سرعت و دقت طول ماهیچههای حیوانات را اندازه بگیرد. آنها امیدوارند طی چند سال آینده این روش را در افراد مبتلا به قطع عضو آزمایش کنند.
Hugh Herr، سرپرست گروه بیومکاترونیک در آزمایشگاه رسانهای MIT و نویسنده ارشد این مقاله، گفت: «امیدواریم که MM جایگزین الکترومیوگرافی به عنوان روش غالب برای پیوند سیستم عصبی محیطی به اندام بیونیک شود. چون سیگنال با کیفیت بالایی از روش مغناطیس سنجی دریافت میکنیم، این روش کمتر تهاجمی است و دارای موانع کمتر و هزینه نظارتی پایینی است».
اندازهگیری دقیق
در پروتزهای موجود، اندازهگیری فعالیت الکتریکی عضلات با الکترودهایی انجام میشود که به سطح پوست متصل یا با جراحی در عضله کاشته میشوند. کاشت با جراحی بسیار تهاجمی و پرهزینه است، اما اندازههای دقیقتری ارائه میدهد. با این حال، در هر دو مورد الکترومیوگرافی (EMG) اطلاعاتی در مورد فعالیت الکتریکی ماهیچهها ارائه میدهد، نه طول یا سرعت آنها.
وقتی از کنترل مبتنی بر EMG استفاده میکنید، به یک سیگنال متوسط نگاه میکنید. شما متوجه میشوید که مغز به ماهیچه چه میگوید، اما آنچه را که در واقع عضله انجام میدهد، نمیبینید.
روش جدید MIT مبتنی بر این ایده است که اگر حسگرها بتوانند عملکرد ماهیچهها را اندازه بگیرند، این اندازهگیریها کنترل دقیقتری برای پروتز ارائه میدهند. برای دستیابی به این هدف، پژوهشگران تصمیم گرفتند آهنرباها را وارد عضلات کنند. با اندازهگیری شیوه حرکت آهنرباها نسبت به یکدیگر، پژوهشگران میتوانند میزان انقباض و سرعت انقباض ماهیچهها را محاسبه کنند.
دو سال پیش،Herr وTaylor الگوریتمی توسعه دادند که زمان مورد نیاز حسگرها برای تعیین موقعیت آهنرباهای کوچک تعبیه شده در بدن را بسیار کاهش میداد. این الگوریتم به آنها کمک کرد تا بر یکی از موانع اصلی در استفاده از مغناطیس سنجی، زمان طولانی اندازهگیری، برای کنترل پروتزها غلبه کنند.
روش کار
پژوهشگران در مقاله جدید Science Robotics، توانایی الگوریتم خود را برای ردیابی آهنرباهای وارد شده در عضلات ساق پای بوقلمونها آزمایش کردند. مهرههای مغناطیسی مورد استفادهی آنها ۳ میلیمتر قطر و حداقل ۳ سانتیمتر از هم فاصله داشتند. اگر نزدیکتر از این باشند، آهنرباها به یکدیگر جذب میشوند.
پژوهشگران با استفاده از مجموعهای از حسگرهای مغناطیسی که در قسمت خارجی ساق پا قرار گرفته بودند، متوجه شدند که با حرکت بوقلمونها میتوانند موقعیت آهنربا را با دقت ۳۷ میکرون (به اندازه عرض موی انسان) تعیین کنند. این اندازهها را میتوان در عرض سه میلیثانیه بدست آورد.
برای کنترل اندام مصنوعی، این اندازهها را میتوان با یک مدل رایانهای تغذیه کرد که بر اساس انقباضات عضلهی باقی مانده در عضو قطع شده، پیشبینی میکند اندام فانتوم بیمار در کجا قرار خواهد داشت. این روش اندام مصنوعی را در مسیری که بیمار میخواهد حرکت میدهد و با تصویر ذهنی که فرد از وضعیت اندام خود دارد مطابقت میدهد.
Herr میگوید: «با مغناطیس سنجی، مستقیماً طول و سرعت ماهیچه را اندازه میگیریم. از طریق مدلسازی ریاضی کل اندام، میتوان موقعیت و سرعت مفاصل مصنوعی را برای کنترل محاسبه کرد. در نهایت یک کنترل کنندهی رباتیک ساده میتواند آن مفاصل را کنترل کند».
کنترل اسکلتهای بیرونی
پژوهشگران امیدوارند طی چند سال آینده، یک مطالعه کوچک روی بیماران انسانی که دچار قطع عضو پا از زانو شدهاند انجام دهند. آنها تصور میکنند حسگرهایی که برای کنترل اندامهای مصنوعی استفاده میشوند، میتوانند روی لباس قرار بگیرند، به سطح پوست متصل شوند یا در خارج از پروتز چسبانده شوند.
همچنین مغناطیس سنجی (MM) میتواند برای بهبود کنترل عضلات با روشی به نام تحریک الکتریکی عملکردی ترکیب شود، این روش برای کمک به بازگرداندن تحرک در افراد مبتلا به ضایعات نخاعی استفاده میشود. یکی دیگر از کاربردهای ممکن برای این نوع کنترل مغناطیسی، هدایت اسکلتهای بیرونی رباتیک است که میتواند به مچ پا یا مفصل دیگری متصل شود تا به افرادی کمک کند که دچار سکته مغزی شدهاند یا از انواع دیگر ضعف عضلانی رنج میبرند.
Herr میگوید: «اساساً آهنربا و اسکلت بیرونی به عنوان یک ماهیچه مصنوعی عمل میکنند که خروجی ماهیچههای بیولوژیکی در اندام آسیب دیده از سکته مغزی را تقویت میکند». مزیت دیگر روش مغناطیس سنجی این است که کمتر تهاجمی است. وقتی مهرهها وارد عضله شوند، میتوانند برای یک عمر بدون نیاز به تعویض در جای خود باقی بمانند.
بیشتر بخوانیم:
>> طراحی یک دست رباتیک بادی ارزان و سبک
منبع: news.mit.edu
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


