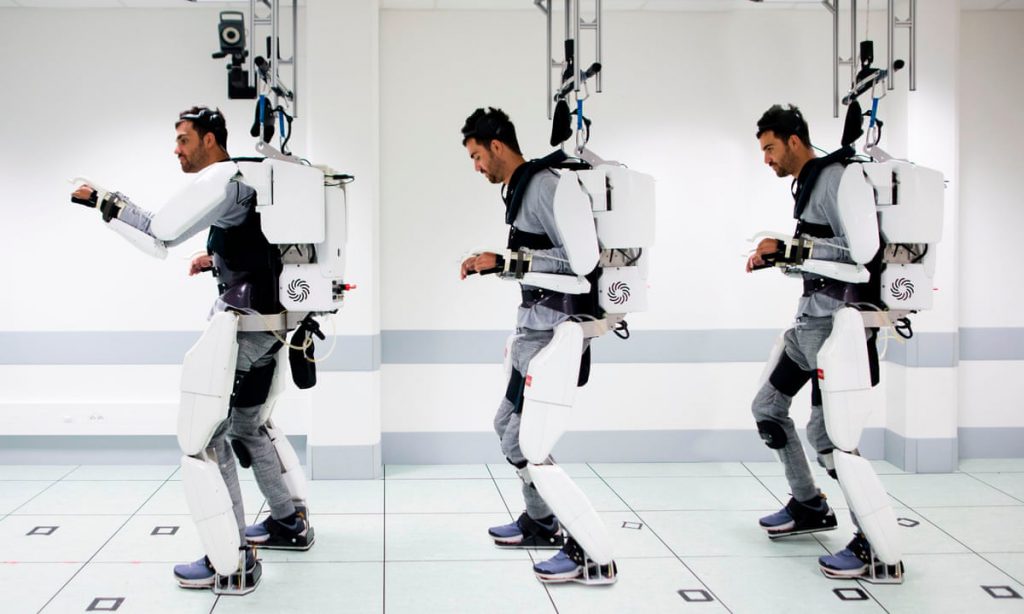
اسکلتهای بیرونی پایین تنه بیشتر به عنوان ابزارهای توانبخشی و کمک به راه رفتن انسان مورد استفاده قرار میگیرند. حجم قابل توجهی از پژوهشها در زمینههای مختلف به توسعه و بهبود عملکرد این دستگاهها اختصاص یافته است و به دلیل الزامات ذاتی قابلیت حمل و تعامل ایمن با کاربر و محیط زیست، چالشهای بسیاری در این زمینه وجود دارد. یکی از مهمترین جنبهها برای بهبود عملکرد این دستگاهها کنترل آنها است. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.

کنترل سطح بالا
کنترل سطح بالا رفتار کلی اسکلت بیرونی را تعیین میکند. بسته به نوع فعالیت موردنظر و محیط (مانند راه رفتن روی زمینهای مسطح، بالا رفتن از پلهها و ایستادن از حالت نشسته)، اسکلتهای بیرونی میتوانند بین چندین حالت عملکرد تغییر حالت دهند.
کنترل قابل اعتماد سطح بالا برای استفاده از اسکلتهای بیرونی توسط افراد در شرایط واقعی و زندگی روزمره بسیار مهم است، جایی که انواع حرکات در محیطها و مسیرهای گوناگون مورد نیاز است و زمان انتقال باید کوتاه باشد.
ورودیهای کنترل کنندههای سطح بالا میتواند از کاربر (از طریق دستگاههای ورودی و یا حسگرها)، محیط یا ترکیبی از هر دو باشد. خروجی معمولاً حالت عملکرد است. روشهای هوش مصنوعی و یادگیری ماشین به عنوان جایگزینی برای انتخاب کاربر استفاده میشوند. انگیزه اصلی این است که عملیات را برای کاربر خودکار کرده تا سریعتر از ورودی دستی باشد. معیارهای اساسی برای استفاده از چنین روشهایی، عملیات در لحظه و زمان پردازش کوتاه است. زیرا تصمیمات باید به سرعت گرفته شود تا زمان واکنش کافی برای کنترل کنندههای سطح پایین فراهم شود. روشهای کنترلی سطح بالا در ادامه بررسی میشوند.
ورودی صریح یا دستی کاربر (MUI)
کاربر به طور مستقیم شیوه عملکرد اسکلت بیرونی را با استفاده از دستگاههای ورودی مانند دکمهها یا دستورهای صوتی تعیین میکند. این روشها در حال حاضر به دلیل سهولت اجرا، پیشبینی پذیری بیشتر و خطای کمتر، رایج هستند. این مزایا به قیمت مشارکت اضافی کاربر است، که موجب میشود تجربه کاربر کمتر طبیعی باشد، بار شناختی را افزایش داده و میتواند عملیات را کند کند. افزون بر این، این روش مستعد خطاهای انسانی است که بیشتر در هنگام انجام کارهای سخت، زمان طولانی کار یا با کاربران تازهکار و حواسپرت رخ میدهد. در این مورد، چالش این است که رابط کاربری را به آسانی استفاده کنید تا زمان یادگیری را کاهش دهید، خطاهای انسانی را به حداقل برسانید و همچنین استفاده سریع برای جلوگیری از اتلاف زمان در مراحل انتقال. این امر بیاهمیت نیست زیرا رابط کاربری باید در حالت ایستاده استفاده شود و دستها باید عصا را نگه دارند.
ورودی صریح کاربر معمولاً در اسکلتهای بیرونی برای حرکت کامل بیماران مبتلا به آسیب نخاعی (SCI) استفاده میشود، زیرا هیچ ورودی از پاها به دست نمیآید. در این حالت میتوان از دکمههای روی دسته عصا یا ساعت مچی مخصوص استفاده کرد. فرمان صوتی رایج نیست زیرا به صحبت نیاز دارد، که ممکن است در فضاهای عمومی احساس ناخوشایندی داشته باشد. همچنین در محیطهای پر سر و صدا بیشتر مستعد خطا است.
رابط مغز و رایانه (BCI)
فعالیت مغزی کاربر با استفاده از الکترودها اندازهگیری، تقویت و تجزیه و تحلیل میشود تا شیوه عملکرد مشخص شود. در میان روشهای مختلف ضبط سیگنال مغزی، در حال حاضر الکتروانسفالوگرافی (EEG) بیشتر مورد استفاده قرار میگیرد زیرا غیرتهاجمی است و استفاده از آن ایمنتر و آسانتر است. برخلاف ویژگیهای امیدوار کننده این روش، چالشهای عملی بسیاری در ارتباط با آنها وجود دارد، از جمله سطوح بالای تمرکز کاربر (در نتیجه محدود کردن فعالیتهای شناختی همزمان مانند گفتار)، آرتیفکتهای عضلانی، روشهای نسبتاً طولانی برای قرار دادن الکترودها، نیاز به آموزش کاربر و الگوریتم، بسیار کند است و محدود به دستورهای بسیار کم.
تشخیص حرکت (MOV)
این نوع کنترلر بسته به شیوه حرکت یا قصد حرکتی کاربر، رفتار را بطور خودکار تغییر میدهد. مزیت اصلی این روش این است که نیازی به بار شناختی یا ورودی مستقیم از کاربر ندارد و موجب میشود که تعامل طبیعیتر شود. برای این روش، به طور کلی حسگرهای مفاصل و دادههای واحد اندازهگیری اینرسی (اغلب از قسمت فوقانی بدن در افراد مبتلا به پاراپلژی) توسط یک الگوریتم یادگیری ماشین یا منطق فازی پردازش میشوند تا وضعیت را تشخیص دهند. گاهی اوقات، انواع دیگری از سیگنالها مانند نیروهای واکنش زمین یا الکترومایوگرافی (EMG) نیز برای استنباط حرکت یا قصد کاربر استفاده میشود. در عمل، ورودیهای اضافی نیز برای تکمیل این کنترلرها مورد نیاز است. برای نمونه برای غیرفعال کردن دستگاه هنگامی که کاربر نیاز به انجام فعالیتهای دیگر در حالت ایستاده در دستگاه دارد. زیرا حرکات کاربر همیشه برای تعیین صحیح قصد کافی نیست.
شناسایی مسیر (TER)
به طور کلی، تعیین کنندهترین عامل در تعیین شیوه عملکرد و رفتار سطح بالای دستگاههای کمکی راه رفتن، مسیر است. بنابراین میتوان از اطلاعات مربوط به نوع زمین و مسیر برای ساخت یک کنترل کنندهی سطح بالا برای چنین دستگاههایی استفاده کرد. در این کنترل کنندهها، حسگرهای تعبیه شده برای تشخیص نوع زمین یا موانع پیش روی کاربر، به منظور برنامهریزی مراحل بر اساس آن استفاده میشود. دوربینهای نوری یا سه بعدی تشخیص عمق و سایر حسگرها مانند حسگرهای فاصله مادون نیز استفاده میشود.
شناسایی مسیر اخیراً در زمینههای ارتز و پروتز مورد توجه قرار گرفته است. نتایج امیدوارکننده بوده است و با پیشرفت در تشخیص الگوها و روشهای یادگیری ماشین، انتظار میرود که در پژوهشهای آینده از چنین کنترل کنندههایی استفاده شود.
کنترل سطح متوسط
سطح متوسط در اینجا به عنوان رفتار مداوم ربات تعریف میشود، که گشتاور یا موقعیت هدف مفاصل را در هر زمان از حلقه کنترل اصلی محاسبه میکند. کنترل کننده سطح متوسط مهمترین نقش را در شکلگیری تعامل دستگاه با کاربر ایفا میکند و بیشتر پژوهشها در مورد کنترل اسکلتهای بیرونی به این سطح اختصاص داده شده است. اگرچه خروجی کنترل کننده سطح بالا نیز بر رفتار تأثیر میگذارد، اما تنها برخی پارامترهای کنترل کننده سطح متوسط را تغییر میدهد بدون آنکه اساس تعامل با کاربر را تغییر دهد.
کنترل سطح متوسط به دو بخش تقسیم میشود. یکی «تشخیص یا همگامسازی» است که فاز یا حالت راه رفتن را برآورد میکند. نتیجه مطلوب این بخش فاز دقیق راه رفتن ( ۰تا۱۰۰ ٪) و حالت راه رفتن است که نوع و تعداد آنها به هر کنترل کننده بستگی دارد.
دیگری بخش «عمل» است و در واقع فرمان موتور را محاسبه میکند. هدف از این بخش ایجاد فرمان حرکتی است که میتواند سینماتیکی (زاویه یا سرعت) یا جنبشی (گشتاور یا نیرو) باشد. بخش اول از ورودیهای خارجی (از حسگرها و یا رابط کاربری) برای تعیین فاز راه رفتن استفاده میکند. در بخش دوم، خروجی فیزیکی مورد نظر دستگاه تعیین میشود. یک کنترل کننده اسکلت بیرونی میتواند یک برنامه کنترلی متفاوت برای هر مفصل داشته باشد.
کنترل سطح پایین
این آخرین لایه و نزدیکترین به محرکها است، بنابراین به ناچار وابسته به دستگاه است. سطح پایین وظیفه انجام «اقدام» موردنظر لایه سطح متوسط را بر عهده دارد. نوع فرمان ارسالی (موقعیت یا نیرو و گشتاور) از لایه سطح متوسط، ماهیت کنترل کننده سطح پایین را تعیین میکند. روشهای بسیاری برای کنترل گشتاور در محرکها وجود دارد.
بیشتر بخوانیم:
>> روش های کنترل اسکلت های بیرونی اندام تحتانی برای کمک به راه رفتن (بخش نخست)
منبع: doi.org/10.1186/s12984-021-00906-3
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


