در سال ۱۹۸۵، گری کاسپاروف بیست و دو ساله جوانترین قهرمان شطرنج جهان شد. دوازده سال بعد، او تنها بازیکنی بود که توانست Deep Blue شرکت IBM را به چالش کشد. در همان سال، ۱۹۹۷، رقابتهای ربوکاپ شکل گرفت تا محبوبترین بازی جهان، یعنی فوتبال با رباتها انجام بپذیرد. بیست سال بعد، ما در آستانه انجام بزرگترین شاهکار هوش مصنوعی هستیم، تیمی از رباتهای انسان نمای کاملاً مستقل که بر بازیکنان جام جهانی فوتبال غلبه کنند. با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
بسیاری از پیشرفتهایی که منجر به هجوم وسایل نقلیه خودران مدرن و هوش مصنوعی شده است، نتیجه دههها رقابت است. در حالی که Deep Blue و AlphaGo بر بهترین بازیکنان جهان غلبه کردهاند، فوتبال نیازمند پیچیدگیهای دنیای واقعی است (جدول را ببینید). تیمهای ربوکاپ باید تعدادی از فناوریهای مکاترونیک را با یک دستگاه انساننما ترکیب کنند، همچون حسگرها، رفتار واکنشی، استراتژی، یادگیری عمیق، برنامهریزی در زمان واقعی، سامانههای چندگانه، تشخیص محتوا، بینایی، استراتژی تصمیم گیری، کنترل موتور و کنترل هوشمند ربات.
پروفسور دانیل لی از آزمایشگاه GRASP دانشگاه پنسیلوانیا، بهترین چالشهای ربوکاپ را توضیح داد: «چرا ما ماشینهایی داریم که میتوانند ما را در شطرنج و یا بازی گو شکست دهند اما ما نمیتوانیم در فوتبال بر آنها غلبه کنیم؟ چه چیزی موجب میشود که به تصویر کشیدن هوش در دنیای فیزیکی دشوار باشد؟».
ربوکاپ بسیار مهم شده است چرا که چالش فوتبال در حال حاضر به لیگهای جدیدی گسترش یافته است که بر تلاشهای تجاری بسیاری از جمله رباتیک اجتماعی، امداد و نجات، و کاربردهای صنعتی تمرکز دارد. این لیگها زیرمجموعههایی با درجههای مختلف دشواری دارند. کمتر از دو ماه دیگر رقابت تیمهای بین المللی در بیست و یکمین دوره این مسابقات در ناگویا، ژاپن، برگزار خواهد شد. به عنوان یک پیش نمایش از آنچه انتظار میرود، اجازه دهید برخی از برندگان سال گذشته را مرور کنیم.
لیگ فوتبال ربوکاپ
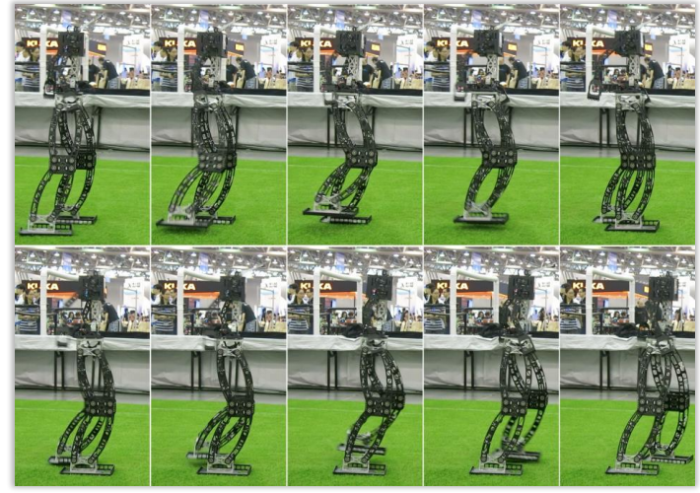
در حالی که تیم فوتبال انسانی ایران در رتبه ۲۸ام جهان قرار دارد، همتایان رباتی آنها یعنی تیم باسط پژوه (Baset Pazhuh Tehran) در رقابت رباتهای انساننمای بزرگسال در رتبه نخست جای دارد. الگوریتم اختصاصی باسط برای کنترل حرکت، درک و برنامهریزی مسیر بینظیر است. بر اساس گزارش گروه باسط، نکته کلیدی که موجب موفقیت آنها شده است راه رفتن سریع و پایدار بود. این ربات قادر به ترکیب تمام دادههای محرک در هر مفصل و تغییر سینماتیک معکوس و مستقیم برای جلوگیری از تأثیر نیروهای خارجی بر ثبات این ربات بوده است. این ویژگی نقش مهمی در ایستاده نگه داشتن ربات هنگام برخورد با رباتهای دیگر یا موانع داشته است. یکی دیگر از عوامل مهم دروازهبان آنها بود که با استفاده از حسگر دید استریو برای شناسایی شوتها و داشتن درک بهتر از تیر دروازه، موانع و دروازهبان حریف نقش مهمی در پیروزی داشت.
این تیم بخشی از یک شرکت بزرگ ایرانی به نام باسط است. مشتریان نفت و گاز باسط میتوانند از تکنیکهای محلی سازی و تشخیص هویت برای بازرسی خطوط لوله و حاملهای خودکار بهرهمند شوند.
رقابتهای امداد و نجات ربوکاپ
در سال ۲۰۰۱، سازمان ربوکاپ شبیهسازی امدادگری را به چالشها افزود و راه را برای بسیاری از نوآوریهای حفظ زندگی که توسط نخستین پاسخ دهندهها ارائه میشود باز کرد. این دوره با شبیهسازی یک محیط زلزله زده آغاز میشود که به موجب آن ربات یک مأموریت جستجو و نجات را به مدت ۲۰ دقیقه انجام میدهد. مهارتها توسط غلبه بر تعدادی از موانع که برای ارزیابی عملیات مستقل، تحرک و دستکاری شیء طراحی شدهاند، سنجیده میشود. امتیازات به وسیله تعداد قربانیان پیدا شده توسط ربات، جزئیات مربوط به قربانیان و کیفیت نقشه منطقه مشخص میشود. در سال ۲۰۱۶، دانشجویان دانشگاه فناوری King Mongkut در شمال بانکوک با Invigorating Robot Activity Project (یا IRAP) توانستند رتبه نخست را به دست آورند.

این گروه در کل چهار ربات داشتند: یک ربات مستقل، دو ربات عامل از راه دور و یک هواپیمای بدون سرنشین. هر یک از این رباتها دارای حسگرهای چندگانه با ارائه دادههای بحرانی همچون سطح CO2، دما، موقعیت مکانی، نقشه برداری دو بعدی، تصاویر و ارتباطات دو طرفه بودند. دستگاههای گروه iRap توانست با سهولت قابل ملاحظهای سطوح خشن محیط، زمینهای سخت، طبقه نورد، پلهها و کفهای شیبدار را مدیریت کند. نمایش چشمگیرتر، کوادکوپتری بود که با استفاده از حسگرهای بهبود یافته، خود را در محدوده جستجو در فضای باز قرار میداد. با توجه به مقاله این گروه : «ما ربات خودمختار فضای باز که رباتی هوایی است را توسعه دادهایم. این ربات میتواند پرواز کند و خود را با حسگر GPS در محل مورد نظر قرار دهد».
جالب توجه است که طراحی این گروه تایلندی به طور قابل توجهی مشابه با Gimball Flyability بود که سال ۲۰۱۵ مقام نخست را در رقابتهای Drones for Good Competition امارات متحده عربی به دست آورد. همانند برنده ربوکاپ، Gimball نیز به طور ویژه برای مأموریتهای جستجو و نجات و با استفاده از فیبر کربن سبک وزن طراحی شده بود.
لیگ رباتهای خانگی ربوکاپ

خانه، مانند فوتبال، یکی از پرطرفدارترین زمینهها برای رباتها است. همچنین یکی از بزرگترین زمینههای مورد علاقه برای مصرف کنندگان است. سال گذشته لیگ رباتهای خانگی دهمین سال حضور خود را با قهرمانی تیم Team-Bielefeld (ToBI) آلمان جشن گرفت. ToBi یک ربات انساننما ساخته است که توانایی یادگیری مهارتهای جدید را از طریق زبان طبیعی در محیطهای ناشناخته دارد. بنابر گزارش این گروه: «این چالش دو لایه دارد. از یک طرف، ما نیاز به درک نشانههای ارتباطی انسانها و نحوه تفسیر رفتار رباتیک داریم. از سوی دیگر ما باید فناوری ارائه دهیم که بتواند محیط را درک کند، انسانها را شناسایی و تشخیص دهد، در محیطهای تغییر یافته حرکت کند، اشیا را دستکاری کند، گفتگو را شروع و صحنههای مختلف را برای درک بهتر محیط درک کند». برای دستیابی به این اهداف بلندپروازانه، تیم یک ابزار تعامل شناختی (CITK) برای حمایت از جمعآوری آثار مورد نیاز، ساخت و استقرار یک نرم افزار خودکار و همچنین یک محیط آزمایشی خودکار، ایجاد کرد.
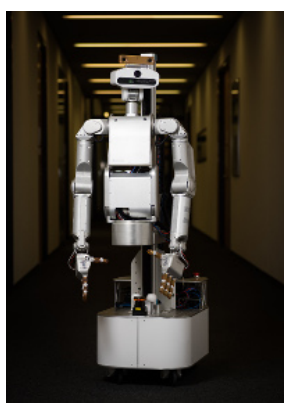
ربات اصلی این تیم Meka M1 Mobile Manipulato آخرین تحولات در تعاملات انسان و ربات در محیط داخلی را نشان داد. این تیم نشان داد که چگونه Meka قادر است درهای بسته را باز کند، با خیال راحت مسیر خود را از اطراف فردی که راهش را مسدود کرده، باز کند، و بسیاری از اقلام خانگی را تشخیص دهد و درک کند.
لیگ رباتهای صنعتی

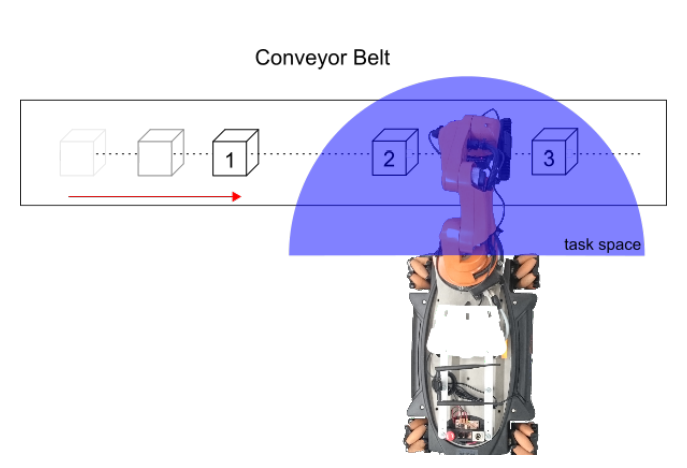
لیگ رباتهای صنعتی (@Work) در سال ۲۰۱۶ و با پیروزی یک گروه آلمانی از دانشگاه لایبنیتس هانوفر(LUHbots) آغاز به کار کرد. در حالی که سخت افزار LUHbots عمدتاً از قطعات آماده و در دسترس استفاده شده بود اما برای نرمافزار از تعدادی الگوریتم اختصاصی استفاده کردند. بر اساس مقاله این گروه: «در رقابت ربوکاپ ما از این نرم افزار استفاده میکنیم، برای نمونه برای گرفتن اشیاء از سینماتیک معکوس استفاده میکنیم تا مسیریابی و ایجاد حرکات سریع و نرم بهینه شود. افزون بر قابلیت استفاده، بهبود اصلی یک گراف بر مبنای رویکرد برنامهریزی و فرکانس بالای کنترل است». کلید استفاده از این روش در تنظیمات کارخانه، تشخیص چهره قوی آن است. این مقاله توضیح میدهد: «ربات سرعت و موقعیت جسم را اندازهگیری میکند و نقطه و زمانی که جسم به محل کار میرسد را محاسبه میکند. بازو بالاتر از نقطه محاسبه شده حرکت میکند. و زمانی که بازو به طور مستقیم بالای جسم متحرک قرار گیرد با همان سرعت شتاب میگیرد تا جسم را در دست گیرد».
همانند دیگر فینالیستها، نرم افزار تشخیص چهره LUHbots عامل تعیین کننده موفقیت آن شد. هدف ربوکاپ از بازی در جام جهانی فوتبال با رباتها ممکن است بیاهمیت باشد، اما تمرین آن چیزی جز بی معنی بودن است. مزیت اصلی در هر دستهبندی، پیشرفتهایی است که در حوزه علوم رقابتی در مقیاس جهانی ایجاد میشود.
به گفتهی سازمان ربوکاپ: «هدف نهایی توسعه یک تیم فوتبال از رباتها است که تیم قهرمان دنیای انسانی را شکست میدهد. (یک هدف نسبتاً کوچکتر، توسعه یک تیم فوتبال رباتیک است که مانند بازیکنان انسانی بازی کنند)». نیازی به گفتن نیست، دستیابی به هدف نهایی، دههها طول خواهد کشید. فناوریهای فعلی برای دستیابی به این امر در آینده نزدیک کافی نخواهد بود.
با این حال، این هدف به راحتی میتواند به یک سری مقاصد کنترل شده هدایت شود. چنین رویکردی در هر پروژه بلندپروازانه یا بیش از حد بلندپروازانه معمول است. نخستین زیرمجموعهای که در ربوکاپ انجام می شود، «ساخت تیمهای واقعی و نرم افزارهای بازیکنان رباتیک فوتبال است که به خوبی با قوانین اصلاح شده بازی میکنند. حتی برای رسیدن به این هدف بدون شک فناوریهایی تولید خواهد شد که بر طیف وسیعی از صنایع تأثیر خواهد گذاشت».

منبع: robohub
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است»

