در توانبخشی رباتیک کمک گرفتن از دستگاه برای حرکت اعضای بدن مهم است. اما آیا واقعا توانبخشی رباتیک بهتر از توانبخشی کلاسیک است؟ چه میزان کمک گرفتن از دستگاه برای حاصل شدن بهترین نتیجه کافیست؟ در ادامه این مقاله از مجله فناوریهای توان افزا و پوشیدنی به یک پژوهش در این زمینه اشاره خواهیم کرد. در این پژوهش سعی شده است بهینه زمان و شدت توانبخشی تعیین شود.

دانشکده کاردرمانی در کالج علوم انسانی و سلامت در دانشگاه Osaka Prefecture در ژاپن روی اثرات کمک گرفتن از رباتیک پوشیدنی بالاتنه برای نجات یافتگان سکته مغزی مطالعه میکند. بازیابی توانایی حرکت بالاتنه برای بیماران و متخصصان چالش مهمی است. در گذشته نظریات متفاوتی توسط پیشگامان درمان سکته مغزی مطرح بود. بسیاری از این نظریات به شکست انجامید. در حال حاضر توابخشی وظیفه محور موثرترین روش درمان است. این روش بر تمرین و آموزش وظیفه محور متمرکز است.
پیشرفتهای فناوری رباتیک توانبخشی را نیز آسانتر کرده است. فناوری به کمک بیماران میآید و در حرکت دادن اعضای مختلف و تمرین و تکرار یک کار به آنان کمک میکند. اما در مورد میزان و شدت کمک گرفتن از وسایل توانبخشی بحث و اختلاف نظر وجود دارد. Takashi Takebayashi پژوهشگری است که عقیده دارد این موضوع که واقعا توانبخشی رباتیک بالاتنه نتایج بهتری نسبت به توانبخشی کلاسیک دارد، هنوز با تناقضاتی روبهرو است.
طراحی آزمایشی برای تعیین میزان و شدت توانبخشی رباتیک پس از سکته
برای پاسخ به این تناقضها این پژوهشگران با توجه به یافتههای موجود پژوهشی را انجام دادند. Takashi Takebayashi و همراهانش ۶۰ بیمار پس از سکته مغزی را با طیف وسیعی از سن و مشخصات از میان ۷۱۵ بیمار در ۶ بیمارستان توانبخشی در ژاپن از نوامبر ۲۰۰۸ تا آوریل ۲۰۱۰ بررسی کردند. آنان این افراد را به دو گروه تقسیم کردند. یک گروه بیشینه توانبخشی رباتیک را دریافت کردند و سایرین کمینه لازم توانبخشی رباتیک. افرون بر این آنان پیشینه بیمار را با جزئیات بررسی کردند. سپس بازده براساس وضعیت فیزیکی،کارایی و حرکت در بالاتنه و … پیش و پس از توانبخشی به مدت شش هفته اندازهگیری شد.
پژوهشهای پیشین اشاره شده بود کمک رباتیک باید بیش از اندازه سبب میشود تلاش بیمار برای دستیابی به نتیجه بیاثر شود. بنابراین میزان کمک دستگاه به بیماران باید در محدوده خاصی باشد. اما Takashi Takebayashi قصد داشتند این مساله را به شکلی اساسی حل کنند. بنابراین بیماران را بر اساس میزان کمکی که از دستگاه توانبخشی دریافت میکردند به دو گروه تقسیم کردند.
پس از شش هفته توانبخشی برای هر دو گروه نتایج توسط یک شخص بیطرف و متخصص که از هدف پژوهش آگاه نبود، این نتایج را تحلیل کرد. بیماران بر اساس ظهور مشکلات ناشی از سکته به چند دسته تقسیم شده بودند. گروه خفیف، خفیف تا متوسط، متوسط تا شدید.
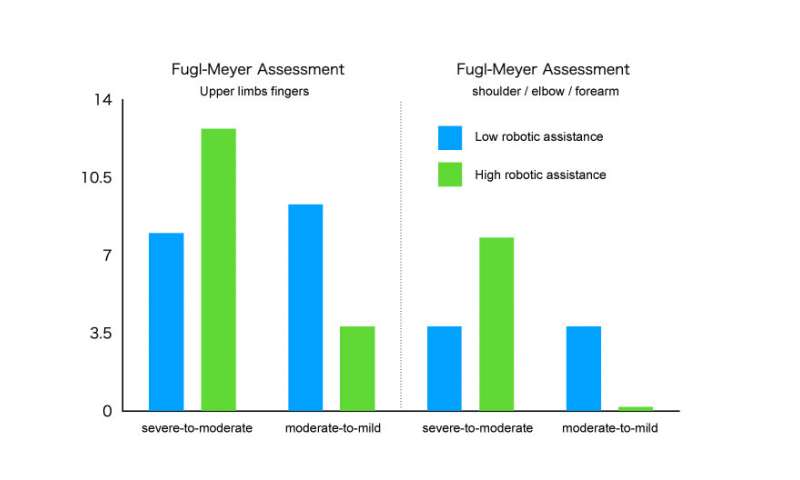
شدت بهینه توانبخشی رباتیک
نتایج این پژوهش نشان میدهد که دخالت برای بیماران دسته متوسط تا شدید سکته (FMA < 30) و با توانبخشی شدید نسبت به گروه توانبخشی کمینه بهتر بود. گروهی که توانبخشی شدیدتری دریافت کردند به بازده بهتری در حرکات بالاتنه دست یافتند. نکته جالب اینجاست که قربانیان سکته متوسط تا خفیف (FMA ≥ ۳۰) در گروه توانبخشی کمینه نیز نتایج بهتری نسبت به گروه توانبخشی شدید با همین میزان آسیب ناشی از سکته داشتند.
به عبارتی برای دست یابی به بیشترین میزان بهبودی در بالاتنه قربانیان سکته، توانبخشی رباتیک در بیماران سکته متوسط تا شدید باید با شدت زیاد انجام شود. اما برای بیمارانی که سکته خفیف داشتهاند شدت توانبخشی نیز باید کاهش یابد. بنابراین پژوهشگران در یافتههای خود شدت توانبخشی رباتیک را نیز با معیارهایی به متخصصان پیشنهاد میدهند.
به طور خلاصه باید گفت که بهینه میزان توانبخشی در مراحل پس از سکته با توجه به شدت سکته متفاوت است. نتایج این پژوهش در Journal of NeuroEngineering and Rehabilitation به چاپ رسیده است.
Sarcos ربات ها و اسکلت های بیرونی خود را به نمایش گذاشت
افزایش توانایی افراد با ربات های اگزواسکلتون
منبع: medicalexpress
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


