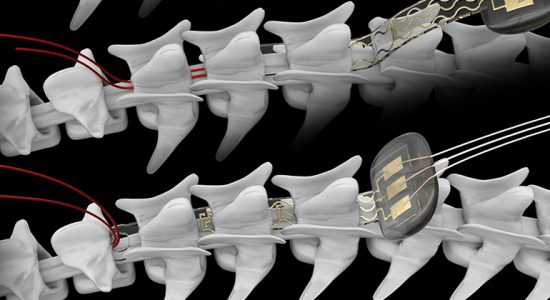
کنترل فعالیت سلول های عصبی ستون فقرات با ایمپلنت جدید فوتوالکتریک
یک ایمپلنت انقلابی که در مؤسسه پلیتکنیک فدرال لوزان (EPFL) توسعه یافته است به دانشمندان اجازه میدهد نورونهای خاص نخاعی را با استفاده از نور فعال یا مهار کنند. این به پژوهشگران بینشی در مورد شیوه عملکرد سیستم عصبی و فرصتی برای توسعه روشهای جدید درمان اختلالات عصبی میدهد. توانایی تحریک یا مهار نورونهای خاص نخاع با استفاده از پالسهای نوری در نهایت به پزشکان اجازه میدهد تا درد را کاهش دهند، عملکردهای…