به طور کلی در زمینۀ طراحی دست رباتیک دو مکتب فکری کلی وجود دارد. در دستۀ اول دستهای رباتیکی قرار دارند که ساده و سرراست هستند و بدون هیچ مشکل کاری را انجام میدهند مانند پنجههای دو یا سه انگشتی که میتوانند با اطمینان کارهای زیادی را انجام دهند. در دستۀ دوم دستهای رباتیک بسیار پیچیده با چهار انگشت و یک شست قرار دارند که برای تقلید از دستهای انسان طراحی شدهاند. برای اینکه این دستها بتوانند بیشترین کار ممکن را به بهترین شکل ممکن انجام دهند باید تا حد امکان به دستهای انسان شبیه باشند. این دستها در واقع به نام دست رباتیک شبه انسانی شناخته می شوند.
به دلیل پیچیدگی ذاتی دست انسان، در ساخت دستهای شبهانسانی مقلد به ناچار سازشهای بسیاری صورت میگیرد تا بتوان ضمن حفظ فرم دست انسانی، عملکردی مناسب نیز فراهم نمود. Zhe Xu و Emanuel Todorov از دانشگاه واشنگتن در سیاتل یک دست رباتیک شبه انسانی مقلد که از نظر جنبشی بسیار دقیق است و بیشترین جزئیات را دارد با هدف نهایی جایگزینی کامل دست انسان ساختهاند.
بنابرگفتۀ Xu اهمیت طراحی نوعی جدید از دست رباتیک شبه انسانی برای آنها عبارتست از:
«رویکرد متعارف برای طراحی دستهای رباتیک شبهانسانی اغلب شامل مکانیزه کردن قطعههای زیستی با لولاها، اتصالها و حلقهها به منظور سادهسازی اجزای متناظر پیچیده انسانی است. به طور کلی این رویکرد برای درک و تخمین سینماتیک دست انسان مفید است ولی به ناچار از آنجا که بسیاری از ویژگیهای بیومکانیکی دست انسان در فرآیند مکانیزه کردن نادیده گرفته میشود تفاوتی نامطلوب بین دست انسان و دست رباتیک به وجود میآید. عدم تطابق ذاتی بین سازوکار این دست رباتیک و بیومکانیک دست بشر اساساً ما را از بکارگیری حرکت دست طبیعی برای کنترل مستقیم آنها باز میدارد. بنابراین هیچ یک از دستهای رباتیک شبهانسانی هنوز نمیتوانند به سطح چابکی انسانی دست یابند.»
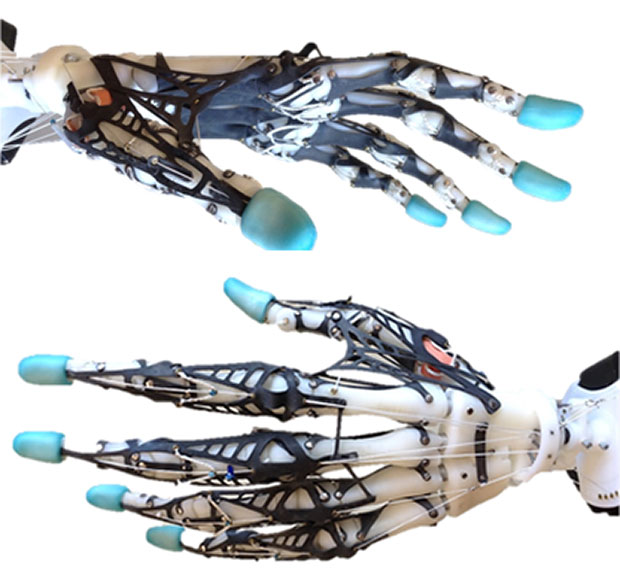
Xu و Todorov تصمیم گرفتند همه چیز را از پایه شروع کنند و دست انسان را با بیشترین دقت ممکن از نظر مکانیکی کپی کنند. نخست، آنها اسکلت دست انسان را اسکن لیزری کردند و استخوانهای مصنوعی دست را برای سازگاری بیشتر، با چاپ سهبعدی ساختن. این کار به آنها اجازه داد محورهای غیرثابت مفصل را همانگونه که هست کپی کنند. Xu در این باره توضیح میدهد:
«برای نمونه، حرکت مخالف شست ما متکی بر شکل پیچیدۀ استخوان ذوزنقهای واقع در مفصل کارپومتاکارپال (CMC) است. با توجه به شکل غیر معمول استخوان ذوزنقهای، مکان دقیق محورهای مفصل کارپومتاکارپال ثابت نیست. بنابراین هیچ یک از دستهای رباتیک شبهانسانی موجود نمیتوانند با مفصلهای مکانیکی معمول که نیازمند محورهای چرخش ثابت هستند، حرکتهای شست را بازسازی کند. ما استخوانهای مصنوعی را از اسکن لیزری اسکلت دست یک جسد چاپ سهبعدی کردیم و آنها را با مفصلهای انگشت مصنوعی که از نظر حرکت، سفتی و رفتارهای پویا بسیار شبیه به همتایان انسانی خود هستند به یکدگیر متصل کردیم.»
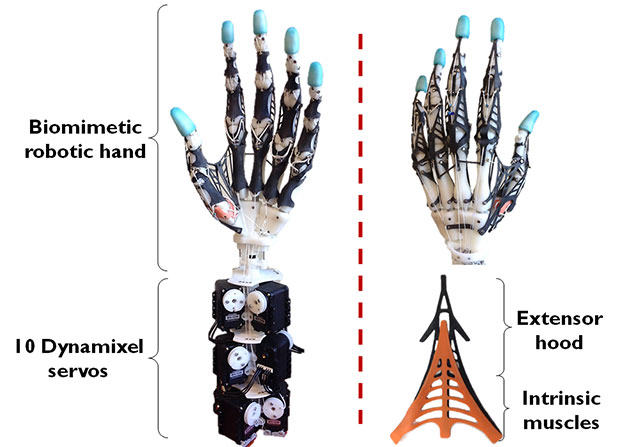
رباطهای مفصلی (که مفصل را ثابت کرده و دامنۀ حرکت آن را کنترل میکنند) از نخهای پرقدرت Spectra ساخته شدهاند و ورقههای لاستیکی با برش لیزری جایگزین بافتهای نرمی شدهاند که انطباق را به مفصلها میافزاید. تاندونهای فلکسور و اکستانسور (برای خم و راست کردن انگشتها) نیز از Spectra همراه با ورقههای لاستیکی بیشتری برای پوشش تاندون و کلاه اکستانسور ساخته شده است. این ورقهها یک ساختار چند لایه پرده دار پیچیده هستند که اطراف انگشتان را پوشاندهاند و به مدیریت انعطاف پذیری و گشتاور کمک میکنند. قسمت پایانی این دست ماهیچههای مصنوعی هستند که از آرایهای از موتورهای سروو Dynamixel تشکیل شدهاند که کابلهای آنها تونلهای مچ دست انسان را به خوبی شبیهسازی میکنند.
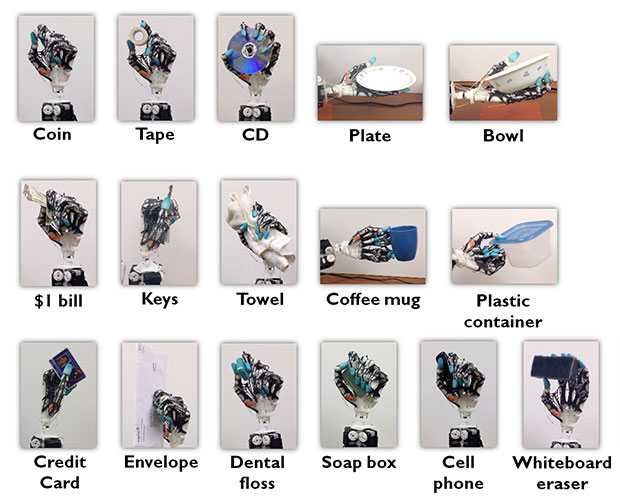
 این دست مصنوعی افزون بر اینکه یک ساختۀ فوقالعاده زیباست، قادر است طیف گستردهای از در دست گرفتنها را به کمک یک دستکش کنترل از راهدور تقلید کند.
این دست مصنوعی افزون بر اینکه یک ساختۀ فوقالعاده زیباست، قادر است طیف گستردهای از در دست گرفتنها را به کمک یک دستکش کنترل از راهدور تقلید کند.
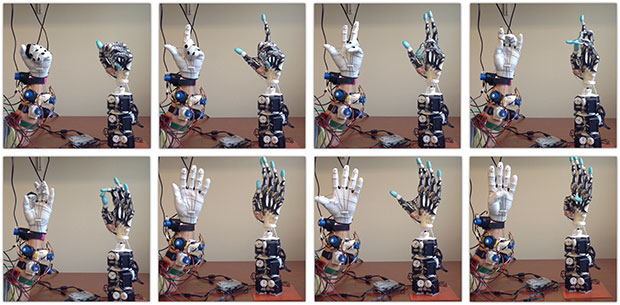 این دست رباتیک شبه انسانی طراحی شده است تا حرکت دست انسان را تقلید کند و در عمل این کار را بیشتر با ساختار خود انجام میدهد تا اینکه بخواهد از نوعی برنامهنویسی بهره ببرد. این روش مزایای بالقوۀ بسیاری را در کنترل از راه دور دارد چرا که کاربر میتواند بیشتر از چابکی دست خود استفاده کند.
این دست رباتیک شبه انسانی طراحی شده است تا حرکت دست انسان را تقلید کند و در عمل این کار را بیشتر با ساختار خود انجام میدهد تا اینکه بخواهد از نوعی برنامهنویسی بهره ببرد. این روش مزایای بالقوۀ بسیاری را در کنترل از راه دور دارد چرا که کاربر میتواند بیشتر از چابکی دست خود استفاده کند.
 چیزی که جالبتر است پیشنهاد پژوهشگران برای استفاده از این دست به عنوان بستری سهبعدی برای پژوهشهای بازسازی اندام است. همانطور که Xu توضیح میدهد:
چیزی که جالبتر است پیشنهاد پژوهشگران برای استفاده از این دست به عنوان بستری سهبعدی برای پژوهشهای بازسازی اندام است. همانطور که Xu توضیح میدهد:
«اساساً کنترل دستهای مصنوعی متکی به مغز انسان است. بنابراین همین فناوریهای اندام مصنوعی عصبی میتوانند کاراتر باشند؛ اگر طراحی این اندام مصنوعی بسیار شبیهتر به همتایان زیستی آنها باشد. در حال حاضر مواد زیست سازگار میتوانند برای شکل دهی ساختارهای استخوانی چاپ شوند، رباطهای مصنوعی زیستتخریبپذیر برای جایگزینی رباط صلیبی قدامی پاره شده بکار گرفته شده است. ماهیچههای انسانی با موفقیت درون ظروف آزمایشگاهی کشت داده شده است. همچنین اعصاب محیطی میتوانند با تأمین شرایط مناسب بازسازی شوند. همه این فناوریهای امیدوار کننده نیازمند بستری برای رشد سلولهای پیوند زده شده هستند. ما با زیستشناسان و مهندسان بافت همکاری خواهیم کرد تا پتانسیل این دست مصنوعی را برای خدمت به عنوان بستری برای زمینههای در حال ظهور اندام مصنوعی عصبی و بازسازی اندام بیشتر بررسی کنیم.»
مقالۀ Design of a Highly Biomimetic Anthropomorphic Robotic Hand Towards Artificial Limb Regeneration نوشتۀ Zhe Xu و Emanuel Todorov از دانشگاه واشنگتن در کنفرانس ICRA در ماه می در استکهلم سوئد ارائه خواهد شد.
منبع: spectrum.ieee.org


