Tim Swift به یکی از اساسیترین مشکلات رباتهای پوشیدنی اشاره میکند: هزینۀ بالای اسکلتهای بیرونی و تلاش برای کاهش آن. به نظر Tim راهکار مناسب آن است که به سراغ اسکلتهای بیرونی پوشیدنی نرم برویم. Tim Swift یکی از طراحان اولیۀ ربات Ekso بوده و از سال ۲۰۰۸ تا ۲۰۱۳ در شرکت Ekso Bionics کار میکرده است. او Ekso Bionics را ترک کرد تا به همراه چند نفر دیگر شرکت Otherlab Orthotics را تأسیس کند. با این هدف که بتواند یک اسکلت بیرونی سبک، ارزان، با قابلیت تغییر اندازه و قابل استفاده در محیطهای مختلف بسازد.
Tim Swift با وجود تجربۀ کار در یکی از باسابقه ترین شرکتهای اسکلت بیرونی، دیدگاه خاصی در این زمینه دارد. او بر این باور است که فناوری اسکلتهای بیرونی کنون تا کنون پیشرفت چندانی نداشته است. اسکلتهای بیرونی کامل و پایین تنه بسیار سنگین و گران قیمت اند و برای کاستن قیمت آنها دهها سال زمان لازم است تا بتوان مواد، موتورها و باتریهای آنها را بهینه کرد.
Swift و شرکت Otherlab Orthotics در تلاشند تا وزن، پیچیدگی و قیمت اسکلتهای خارجی را با توسعۀ اسکلتهای بیرونی نرمی که با فشار هوا کار میکنند کاهش دهند. البته این رویکرد ممکن است چندان هم موفقیت آمیز نباشد. زیرا کمپرسورهای هوای متداول امروزی بزرگ، زمخت و بسیار پرمصرف هستند. افزون بر این برای کنترل کردن هوای فشرده به نشانگرها و شیرهایی نیاز است که سنگین و کند هستند.
آیا Tim واقعاً حرفی برای گفتن دارد؟
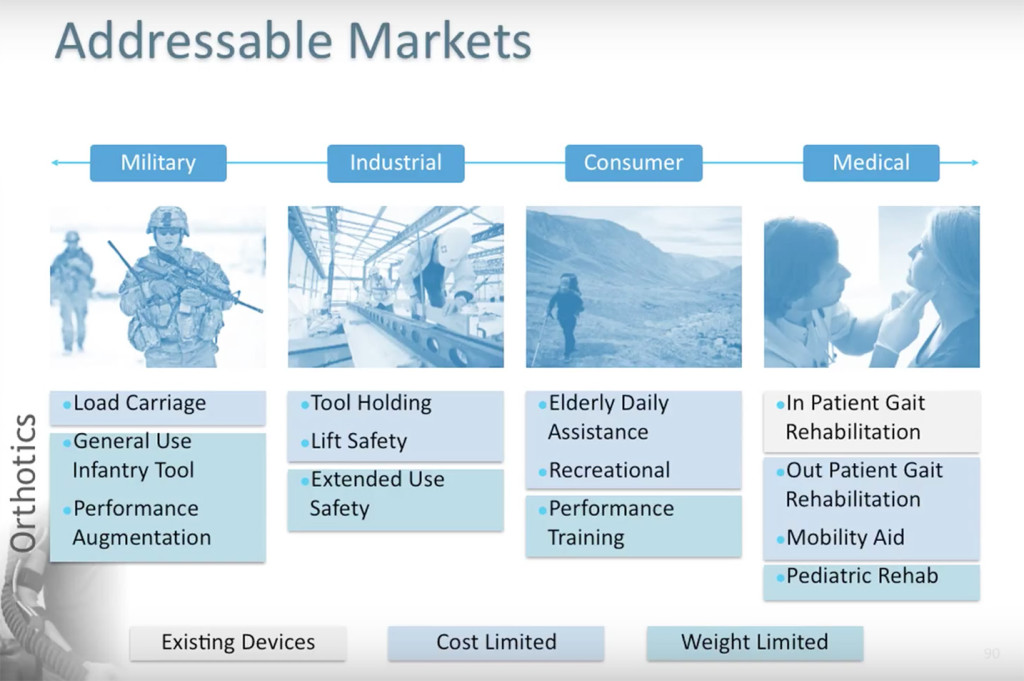
کمبود تنوع در فناوریهای اسکلتهای بیرونی – تصویر از Otherlab Orthotics Tell & Show 2015
در این سخنرانی، Tim Swift ادعا میکند که فناوری اسکلت بیرونی باید تغییری اساسی کند. آیا او تنها یک کارمند ناراضی شرکت Ekso Bionics است یا واقعاً حرف تازهای برای گفتن دارد؟ اگر نخستین اسکلت بیرونی رباتیک مدرن را رباتی بدانیم که مؤسسۀ Mihaili Pupin در سال ۱۹۷۸ ساخت، آنگاه باید گفت که از آن زمان تا کنون پیشرفت شگرفی در این ۳۷ سال رخ نداده است. دیدگاه Tim Swift آن است که در آینده اسکلتهای بیرونی وسیلهای خواهند بود که مانند دوچرخه یا تلویزیون در هر خانهای پیدا میشوند. با نگریستن به اسلاید بالا میتوانی ببینیم که اسکلتهای پوشیدنی برقی تنها راه خود را در یکی از شاخههای پزشکی دنبال کردهاند و با این حال و با آنکه دهها شرکت و دانشگاه، دهها سال را صرف کار بر روی این وسایل پوشیدنی و قابهای سخت آن کردهاند، پیشرفت در این حوزه بسیار کند بوده است. البته شرکت Otherlab Orthotics تنها استارتاپی نیست که بر روی اسکلتها بیرونی نرم کار میکند. دانشگاههای صاحب نامی مانند هاروارد و نیز DARPA هم مشغول پژوهش دربارۀ اسکلتهای خارجی نرم هستند. یکی از موفقترین محصولهای اسکلتهای بیرونی از نظر تعداد فروش، Ski Mojo است که درواقع داه خود را تا حدی از اسکلتهای سخت جدا کرده است. به تازگی در خبرها آمده است که جلیقۀ کنترل وضعیت بدن V22 ساختۀ StrongArmTech توجه کمپانی بزرگ ۳M را به خود جلب کرده است. البته همه با این موضوع موافق نیستند که آیندۀ فناوریهای اسکلتهای بیرونی وابسته به ایجاد تغییری اساسی (در اینجا حذف قاب محکم مکانیکی) است. مثلاً همایون کازرونی، از مؤسسان شرکت Ekso Bionics که خود نیز این شرکت را برای تاسیس شرکت خود یعنی US Bionics ترک کرد، بر این باور است که میتوان قیمت اسکلتهای بیرونی را با به کار بردن قطعات دم دستی تر و حذف کاراییهای نه چندان مورد نیاز پایین آورد.
Otherlab Orthotics از چه نوع ماهیچه های بادی استفاده میکند؟

محرک مرکزی Otherlab Orthotics
ماهیچه های بادی نشان داده شده در این ویدئو از نوع نیوماتیکی هستند. این فناوری پیشرو در قالب طرح DARPA با نام «بیشترین قابلیت حرکت و کارایی (Maximum Mobility and Manipulation) و با بودجه ای ۸۰۰ هزار دلاری و به دست شرکت خواهر Otherlab یعنی Pneubotics به دست آمد. این وسیله یک کیسه با قابلیت باد شدن با هواست و پوششی از نایلون سخت مانند آنچه در ساخت کوله پشتی ها به کار میرود دارد. بزرگترین مزیت وسایل نیوماتیکی حذف درایو، چرخدنده ها، محورها، تسمه ها و میله های لغزنده است که منجر به ساخت یک وسیلۀ بسیار سادهتر میشود.
دربارۀ Otherlab
Otherlab یک مرکز رشد تحقیقاتی خصوصی (incubator) مستقر در سان فرانسیسکو است و Otherlab Orthotics سومین شرکت اسکلت بیرونی است که دفتر مدیریت آن در سان فرانسیسکو و Bay Area قرار دارد.
احتمالاً Tim Swift و Otherlab Orthotics به زودی به دستاوردهای خوبی خواهند رسید و اطلاعات بیشتری دربارۀ پژوهشهای خود در اختیار ما خواهند گذاشت. در حال حاضر مصاحبهای از Tim Swift که در سال ۲۰۱۴ انجام شده در وبگاه slashdot.org موجود است که میتواند کمی ما را با اسکلت پوشیدنی مورد نظر او آشنا کند.
منبع: Exoskeleton Report


