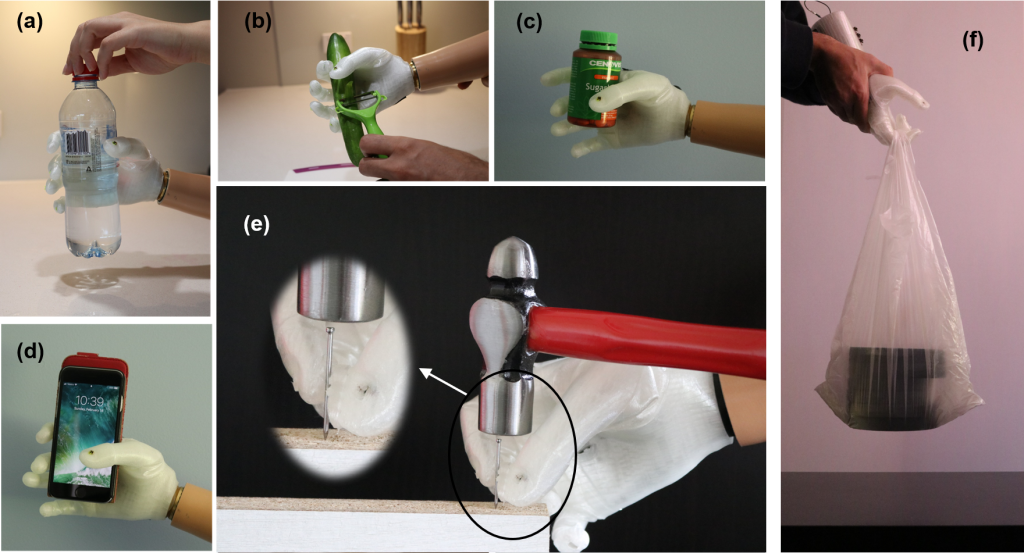
پژوهشگران دانشگاه ملبورن طرحی ارائه دادهاند که میتواند پروتزهای دست را هم سبک و هم مقرون به صرفه کند. این پروتز دست با نام X-limb کاربر را قادر میسازد کارهایی از قبیل گرفتن تلفن همراه، گره زدن بند کفش و باز و بسته کردن زیپ کت را انجام دهد یا از قیچی استفاده کند. X-limb تنها ۲۵۳ گرم وزن دارد و توسط حسگرهایی که روی سطح پوست قرار دارند یا با دکمههای روی مچ دست فعال میشود. برای آشنایی بیشتر با این طرح با مجله فناوریهای توانافزا و پوشیدنی همراه باشید.
چالش پروتزهای دست
از دست دادن اندام با محدود کردن عملکرد فعالیتهای روزمره، استقلال شخص را به شدت تحت تأثیر قرار میدهد. اگرچه اندامهای مصنوعی برای افراد قطع عضو ایجاد شده است، از پروتزهای دست فعلی به ندرت استفاده میشود. بیشتر افراد قطع عضو ترجیح میدهند وظایف خود را با استفاده از باقیمانده اندامشان انجام دهند، با وجود وضعیت غیرطبیعی که موجب درد مزمن کمر میشود و استفاده بیش از حد از بازو که عوارضی را به همراه دارد. پروتزهای دست فعلی دارای وزن سنگین، اتصالات ناراحت کننده و رابطهای کنترلی پیچیدهای هستند.
دستهای رباتیک نرم و دارای ساختار یکپارچه، به دلیل مزایایی همچون وزن سبک و طراحیهای جمع و جور و همچنین سهولت ساخت آن، پتانسیل بسیار خوبی برای استفاده به عنوان پروتز نشان دادهاند. با این حال، طراحیهای موجود به دلیل برخی الزامات عملی که در پژوهشها برجسته شده، عملی نشدهاند. شکاف بین طرحهای موجود و الزامات عملی به میزان قابل توجهی مانع از انتقال این طرحها به دنیای واقعی میشود.
این الزامات عبارتند از:
وزن سبک (کمتر از وزن متوسط دست انسان)
سیستم فعالسازی ذاتی (تعبیه شده در ساختار دست)
طراحی سینماتیک و انطباق در طراحی مکانیکی
انگشت شست فعال برای انواع مختلف گرفتن
سهولت ساخت و شخصیسازی
قابلیتهای کافی و تعادل بین کارکردها و پیچیدگیها
نوآوری در طراحی
پژوهشگران دانشگاه ملبورن یک پروتز نرم دست ایجاد کردهاند که مشکلات فعلی با پروتزهای دست و نیاز افراد قطع عضو را با استفاده از رباتیک نرم پاسخ میدهد:
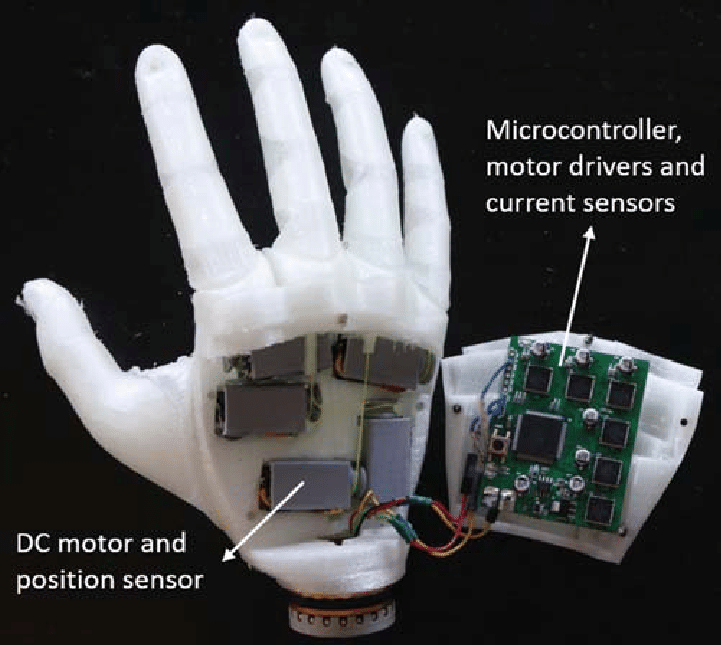
– انگشتان این پروتز با استفاده از اتصالات و لولاهای خمیده طراحی شده و با استفاده از روش چاپ سه بعدی و با مواد نرم ساخته میشود. مفصلهای متحرک خمیده، اصطکاک کم، جابجایی مداوم و طراحی نسبتاً سبک و کم حجمی را فراهم میکند.
– همچنین انطباق در اتصالات، سازگاری با اشیای در دست گرفته شده را بهبود میبخشد (به طور بالقوه استحکام چنگ زدن را بهبود میبخشد)، طراحی مکانیکی را بسیار ساده و تعامل بیخطر با انسان را امکانپذیر میکند.
– به دلیل طراحی پارامترها با رایانه و استفاده از روشهای چاپ سه بعدی، برای اندازههای مختلف دست قابل تنظیم است، از جمله برای کودکان.
– کنترل کاربر پسند با طراحی ترکیبی از حرکات انگشتان همراه شده است. این کار موجب میشود تا کاربران بتوانند طیف گستردهای از اشیاء را با یک حرکت در دست بگیرند و نیاز به تعویض چندگانه بین حالتهای مختلف نباشد. افزون بر این، ما بر روی چنگ زدنهای متداول متمرکز شدهایم.
قابلیت تولید: X-Limb به طور خاص با استفاده از روشهای تولید افزودنی و چاپ سه بعدی و با مواد نرم طراحی و ساخته شده است. ساخت افزودنی امکان تحقق و ساخت ویژگیهای پیچیده را فراهم میآورد (برای نمونه فضای توخالی) که با روشهای ساخت معمولی امکان پذیر نیست. این دست با ساختار یکپارچه طراحی شده است. ساخت سازههای یکپارچه نیاز به مونتاژ و ارتباطهای ناخواسته را از بین میبرد.
بازار: این محصول بازار جهانی افراد قطع عضو از ناحیه دست (۴۵۰،۰۰۰ در جهان) را هدف قرار میدهد.
ویژگیهای اصلی طراحی X-Limb:
– وزن کلی: ۲۵۳ گرم
– انواع چنگ زدن و گرفتن اشیا: سه نوع چنگ زدن و گرفتن اشیا (با کمک کف دست و همه انگشتان، با دو انگشت و سه انگشت) با قابلیت حرکت مستقل هر انگشت
– نیروی گرفتن: نیروی چنگ زدن و گرفتن اشیا با کف دست ۲۱٫۵ نیوتن و نیروی گرفتن با دو انگشت ۱۰٫۲ نیوتن
– سرعت باز و بسته کردن دست: ۱٫۳ ثانیه
– هزینه: هزینه مواد ۲۰۰ دلار است.
عملکرد X-Limb در انجام فعالیتهای زندگی روزمره در ویدئوی زیر قابل مشاهده است:
اطلاعات مربوط به طراحی این پروتز دست به صورت متن باز در دسترس است.
بیشتر بخوانیم:
>> طراحی پروتز دست ارزان قیمت با قابلیت ارائه بازخورد لمسی
>> برای نخستین بار فردی همزمان دو پروتز دست را با ذهن خود کنترل میکند
منبع: PLoS ONE
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


