در سالهای اخیر، هنر اریگامی منبع الهام برای پژوهشگران شده است تا رباتهای سبک و تاشو طراحی کنند. یکی از چالشهای چنین رباتهایی نیاز به باتری برای تامین توان ربات است. گروهی از پژوهشگران موسسه ویس (Wyss) این چالش را با طراحی رباتهای کوچک بینیاز از باتری حل کردند. این رباتها به باتری نیاز ندارند و توان آنها به صورت بیسیم تامین میشود. با مجلهی فناوریهای توانافزا و پوشیدنی همراه باشید.
هنر اریگامی و رباتهای تاشو
هنر سنتی ژاپنی، اریگامی یک ورق کاغذ را به شکل سه بعدی پیچیده تبدیل میکند. رباتهای تاشو گروهی از رباتهای با طراحی الهام گرفته از اریگامی هستند اما این رباتها برای تغذیه به باتریها و اتصال سیمی نیاز دارند. این مشکل برای رباتهای منعطف و تاشو محدودیت ایجاد میکند.
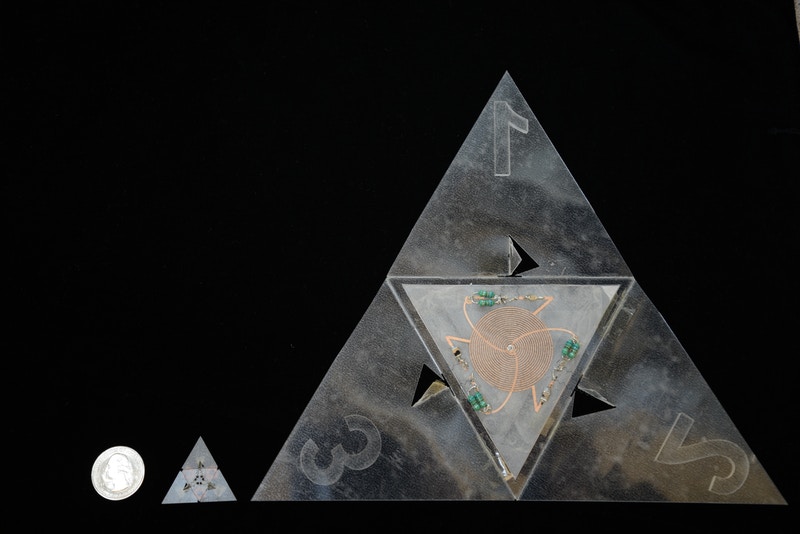
گروهی از پژوهشگران موسسهی ویس (Wyss) دانشگاه هاروارد رباتهای تاشو بدون نیاز به باتری طراحی کردهاند. این ربات توسط میدان مغناطیسی قابل کنترل است. این ربات تنها به قطعات سادهی الکترونیکی نیاز دارد تا جریان الکتریکی را عبور دهند. رباتها بسیار ظریف و کوچک هستند. سه صفحهی مثلثی از طریق لولا به یک صفحهی مثلثی مرکزی متصل هستند و یک مدار روی صفحهی مرکزی قرار دارد. اتصالات صفحهها شامل سیمپیچهایی فلزی (coil) هستند که آلیاژهای حافظهدار (SMA) هستند. این آلیاژها پس از تغییر شکل با گرم شدن تا دمای خاصی به شکل اصلی خود باز میگردند. در واقع، با برقراری جریان در مدار و گرم شدن آلیاژها صفحههای مثلثی به سمت مرکز حرکت میکنند و هنگامی که جریان الکتریکی متوقف شود سیمپیجهای SMA به حالت اصلی باز میگردند.
باتریهای بیسیم
توان موردنیاز جریان الکتریکی و در نتیجه حرکت ربات با روش انتقال توان الکترومغناطیسی به صورت بیسیم تامین میشود. این دقیقا همان روشی است که در صفحههای شارژ بیسیم گوشیهای هوشمند به کار گرفته میشود. یک سیمپیچ خارجی که یک منبع تغذیه دارد میدان مغناطیسی تولید میکند و در نتیجه در مدار تعبیه شده در ربات جریان الکتریکی برقرار میکند. با گرم شدن سیمپیچهای حافظهدار پرههای ربات حرکت میکند.
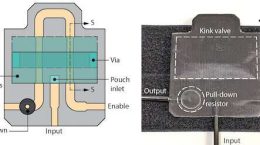
برای کنترل حرکت هرکدام از پرههای ربات به صورت جداگانه، یک رزوناتور برای هر سیمپیچ درنظر گرفتند تا هرکدام به فرکانس الکترومغناطیسی خاصی پاسخ دهند. با تغییر فرکانس میدان مغناطیسی خارجی، پژوهشگران قادر هستند حرکت هرکدام از پرههای ربات را به صورت جداگانه کنترل کنند.
آلیاژهای حافظهدار، مفاصل رباتهای منعطف
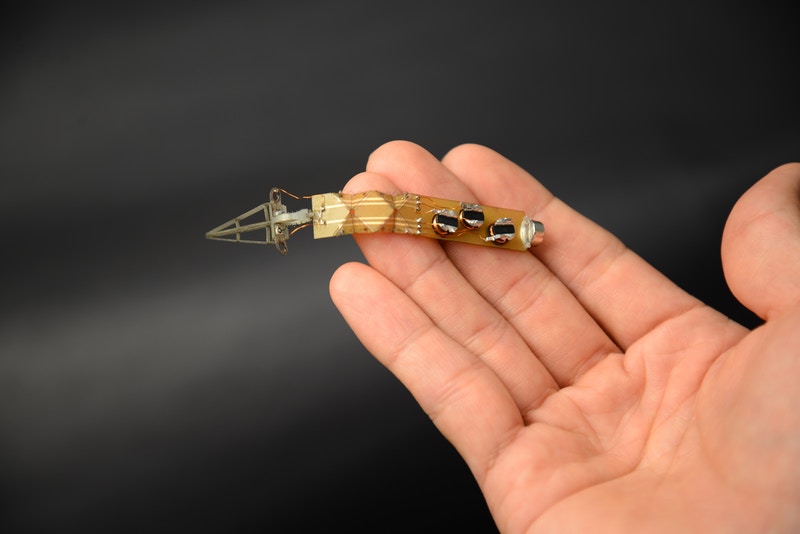
همانند انقباض و آزاد شدن ماهیچههای بدن، سیمپیچهای حافظهدار قادر هستند منقبض و آزاد شوند. پژوهشگران یک بازوی رباتیک کوچک طراحی کردند که قادر است به جهت راست و چپ حرکت کند. همچنین مانند اینکه بخواهد به اشیا چنگ بزند باز و بسته میشود. این بازوی رباتیک بر اساس الگوی اریگامی طراحی شده است. برای هدایت مستقل هرکدام از حرکتهای ربات از فرکانسهای الکترومغناطیسی متفاوت استفاده شد.
کاربردهای رباتهای تاشو کوچک
برای این رباتهای ظریف تاشو بدون نیاز به باتری کاربردهای زیادی از طراحی مینیاتوری تا زیست پزشکی وجود دارد. برای نمونه میتوان به جای عمل ناخوشایند آندوسکوپی از این رباتها بهره برد. بیمار تنها با بلعیدن یک ربات کوچک همانند قرص آندوسکوپی میشود. ربات با حرکتکردن و انجام وظایف ساده مانند نگهداشتن بافت و یا تصویربرداری به این عمل کمک شایانی خواهد کرد.
بیشتر بخوانید:
>>ساخت ارتشی از رباتهای کوچک برای مبارزه با سرطان
>>موسسۀ فناوری ماساچوست رباتهایی میسازد که قابل بلعیدن است
منبع: wyss
استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توانافزا و پوشیدنی) مجاز است