پژوهشگران ابزارهای رباتیکی نرمی تولید کردهاند که توسط یک بافت عصبی عضلانی و نور حرکت میکند. با این پیشرفت مهندسی مکانیک یک گام به توسعه زیست رباتهای خودگردان نزدیک شد. در ادامهی این مقاله از مجلهی فناوریهای توانافزا و پوشیدنی به مرور این ابزارهای جدید میپردازیم.
مقدمه ای بر پژوهش های پروفسور طاهر سیف
در سال ۲۰۱۴ گروههای پژوهشی زیرنظر پروفسور طاهر سیف، مهندسی و علوم مکانیک و پروفسور رشید بشیر، زیست مهندسی، در دانشگاه ایلینویز موفق به تولید نخستین زیست-رباتهای شناگر و راه رونده شدند. نیروی این رباتها از تحریک سلولهای عضله قلبی گرفته شده از موشها تأمین میشود.
رباتهای شناگر با الگوبرداری از سلولهای اسپرم و با به کارگیری بافت قلب ساخته شدهاند. نخستین بررسیها نشان داد که این شناگرهای تک دم به خودی خود میتپند، اما توانایی شناسایی محیط اطراف را نداشتند.
ساخت نوع جدیدی از ربات های دو دم
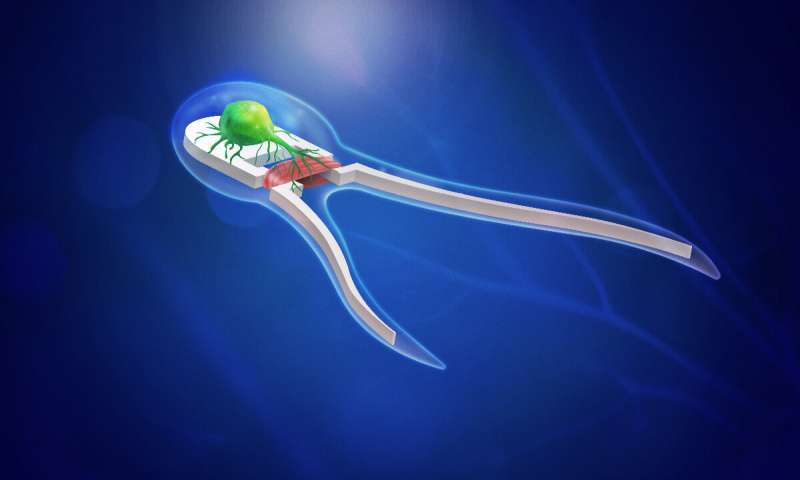
در مطالعهی جدید منتشر شده در مجلهی پیشرفتهای آکادمی ملی علوم که توسط سیف رهبری میشد، پژوهشگران نسل جدیدی از رباتهای دو دم را معرفی کردند. این رباتها با استفاده از بافت اسکلتی عضلانی حرکت میکنند که بوسیله عصبهای سوار شده بعنوان موتور، تحریک میشوند. این عصبها خواص اپتوژنتیکی دارند و به محض قرارگیری در معرض نور شروع به تحریک عضلات میکنند.
سیف خاطر نشان کرد : «ما یک کشت از سلول عصبی اپتوژنتیک گرفته شده از سلولهای بنیادی موش را در مجاورت بافت عضلانی قرار دادیم. عصبها به سمت عضله پیشروی کردند و پیوندهای عصبی عضلانی را تشکیل دادند و شناگر به خودی خود ساخته شد».
پس از تایید سازگاری بافت عصبی عضلانی با اسکلتهای ربات زیستی، این گروه برای بهبود تواناییهای شناگر تلاش کردند. گروه از مدلهای محاسباتی پروفسور ماتیا گازولا، استاد مهندسی و علوم مکانیکی، برای تعیین ویژگیهای فیزیکی رباتها بهره بردند. این محاسبات روش سریعتر و کارآمدتر ساختن ربات را نشان میدهد. برای نمونه، برای نیل به موثرترین طراحی شناگر زیست-دوگانه، بررسی تغییرات در تعداد و طول دمها لازم بود.
به گفتهی دکتر گازولا : «محرکهای زیستی یا به عبارتی زیست-رباتها به اندازه سایر فناوریها به بلوغ نرسیدهاند و قادر به تولید نیروهای بزرگی نیستند. این مساله باعث میشود که هدایت حرکت آنها مشکل باشد. طراحی دقیق داربستی که زیست-رباتها در اطراف آن رشد میکنند بسیار مهم است. طراحی دقیق پربازدهترین خروجی را از این فناوری بیرون خواهد کشید و به عملکردهای متحرک مناسبی منجر میشود. شبیه سازیهای رایانهای اجرا شده نقش اساسی در مورد این وظیفه ایفا میکنند بطوریکه میتوانیم تعداد بسیاری از طراحیهای مختلف را پیاده سازی کنیم و تنها تعدادی از امیدوار کنندهترین آنها را برای آزمودن در زندگی واقعی انتخاب کنیم».
به گفتهی دکتر سیف توانایی هدایت فعالیت عضلانی با استفاده از سلولهای عصبی، راه را برای مجتمع سازی بیشتر واحدهای عصبی در درون سامانههای زیست-دوگانه باز میکند. با توجه به درک ما از کنترل عصبی در جانوران، امکان استفاده از یک ساختار سلسله مراتبی از شبکههای عصبی در زمینهی طراحی عصبی عضلانی زیست-دوگانه وجود دارد».
آینده ی ربات های گروه پژوهشی پروفسور طاهر سیف
پروفسور سیف اشاره کرد که او و گروهش پیشبینی میکنند که این پیشرفت منجر به توسعهی سامانههای زندهی مهندسی شده چند سلولی میشود. این سامانهها قابلیت پاسخ هوشمند به نشانههای محیطی را دارند و در حوزههای زیست مهندسی، پزشکی و فناوریهای مواد خود-درمانگر کاربرد دارند. با این وجود، آنها اذعان میکنند که –همانند ارگانیسمهای زنده- هیچ دو ماشین زیست-دوگانهای طوری ساخته نخواهند شد که دقیقا یکسان باشند.
سیف گفت: «دقیقا همانطوری که هیچ دوقلویی واقعا یکسان نیستند، دو دستگاه طراحی شده برای انجام عملکرد مشابه نیز یکسان نخواهند بود. یکی ممکن است سریعتر حرکت کند و یا از آسیبی متفاوت از دیگری بهبود یابد – یعنی دقیقا همان ویژگی منحصربفرد ماشینهای زنده».
در همین زمینه در مجلهی فناوریهای توان افزا و پوشیدنی:
>> معرفی برترین استارتاپهای رباتیک اروپایی
>> آیندهی رباتهای امداد و نجات
منبع: techexplore
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»


