پژوهشگران MIT نوع جدیدی از سامانهی عملکرد دورگردان (Teleoperation system) را رونمایی کردهاند که به یک ربات دوپا اجازه میدهد مهارتهای بدنی یک کاربر انسانی را “قرض” بگیرد تا با چابکی بیشتری حرکت کند. این سامانه کم و بیش شبیه به سازوکار لباسهای مخصوص در فیلم “Ready Player One” اسپیلبرگ کار میکند. درحالیکه از لباسهای موجود در آن فیلم برای اتصال انسان به آواتارهای واقعیت افزوده استفاده میشد، اینجا لباس MIT کاربر را به یک ربات واقعی متصل میکند. با مجلهی فناوریهای توانافزا و پوشیدنی همراه شوید.
یک سامانه جدید انتقال (دورگردان) دو طرفه، حرکات شما را به ربات و حرکات ربات را برای شما ارسال می کند
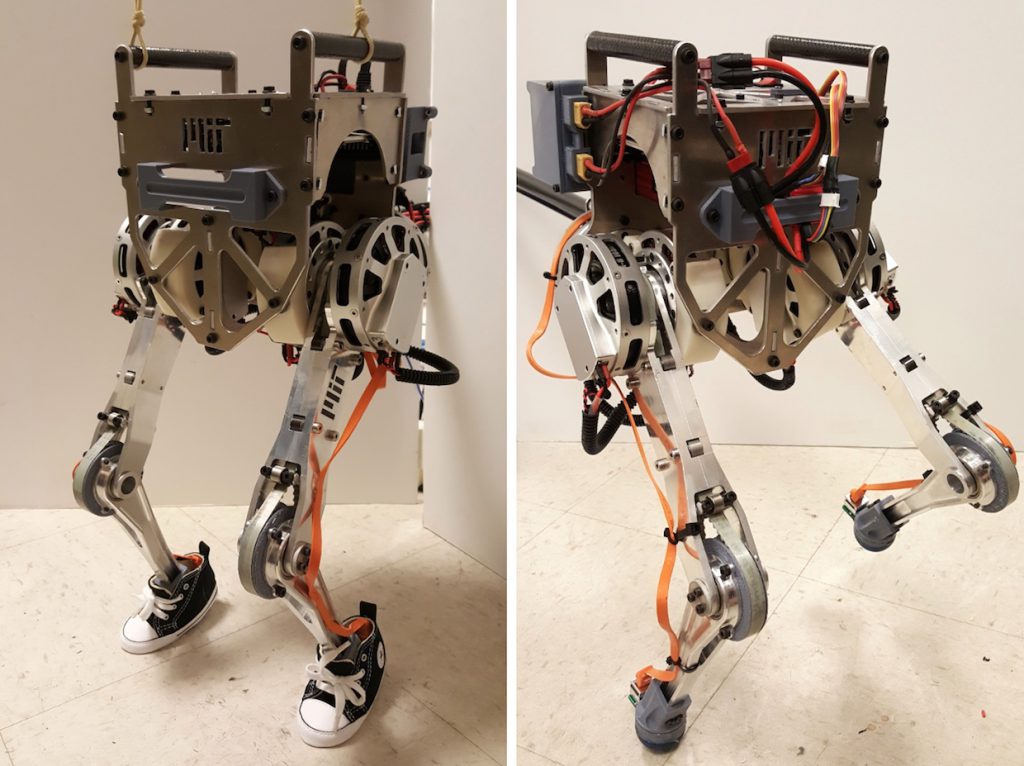
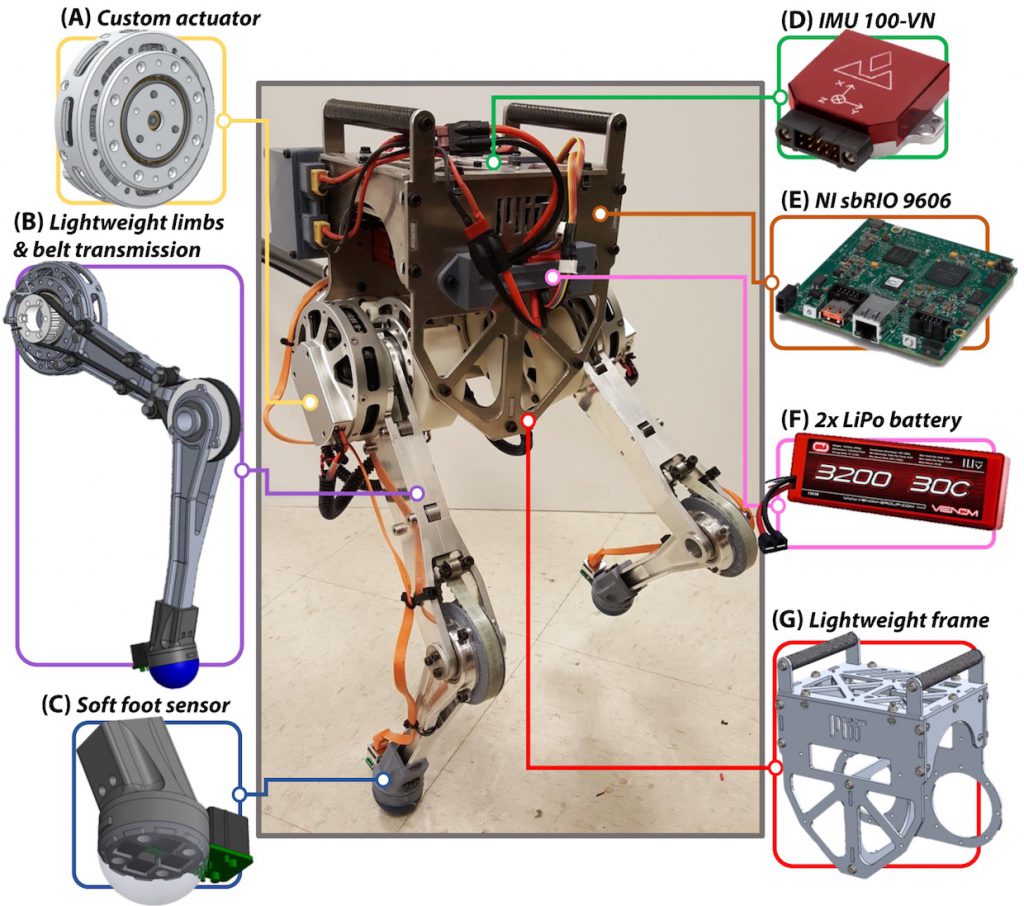
این ربات هرمس کوچک (Little HERMES) نامیده میشود و در حال حاضر فقط یک جفت پای کوچک دارد که تقریباً یک سوم اندازهی یک بزرگسال است. میتواند قدم بزند و درجا پرش کند و یا مسافتی کوتاه را در حالی که توسط یک نگهدارنده پشتیبانی میشود، پیاده طی کند. درحالیکه این قابلیت چندان چشمگیر نیست، پژوهشگران میگویند که رویکرد آنها میتواند رباتهای امدادگر را به واقعیت نزدیکتر کند. با وجود پیشرفتهای اخیر، ساختن رباتهای کاملاً مستقل با مهارتهای حرکتی و تصمیم گیری مشابه با مواردی که در انسان هست، همچنان یک چالش محسوب میشود. در این موارد یک سامانه دورگردان پیشرفتهتر میتواند کمک کند.
رویکرد جدید در طراحی بازخورد دوطرفه
پژوهشگران João Ramos ، استادیار دانشگاه ایلینویز در Urbana-Champaign و Sangbae Kim ، مدیر آزمایشگاه Robotics Biomimetic MIT ، این طرح را در شمارهی این هفتهی مجلهی Science Robotics شرح میدهند. آنها استدلال میکنند که سامانههای دورگردان موجود نمیتوانند به طور مؤثر عملکرد کاربر را با یک ربات مطابقت دهند. افزون بر این، سامانههای معمولی در مورد آنچه که ربات انجام میدهد، هیچ بازخورد جسمی به انسان یا کاربر نمیدهند. رویکرد جدید آنها به این دو محدودیت اشاره میکند و برای دیدن اینکه چگونه در عمل کار میکند، HERMES کوچک را ساختند.
در اوایل سال جاری، پژوهشگران MIT مقالهای مفصل را برای IEEE Spectrum در مورد این طرح نوشتند، که شامل HERMES کوچک و همچنین برادر بزرگ آن بود ( HERMES مخفف سازوکارهای رباتیک بسیار کارآمد و سامانه الکترومکانیکی است). آنها در این مقاله، دو مؤلفهی اصلی سامانه را شرح میدهند:
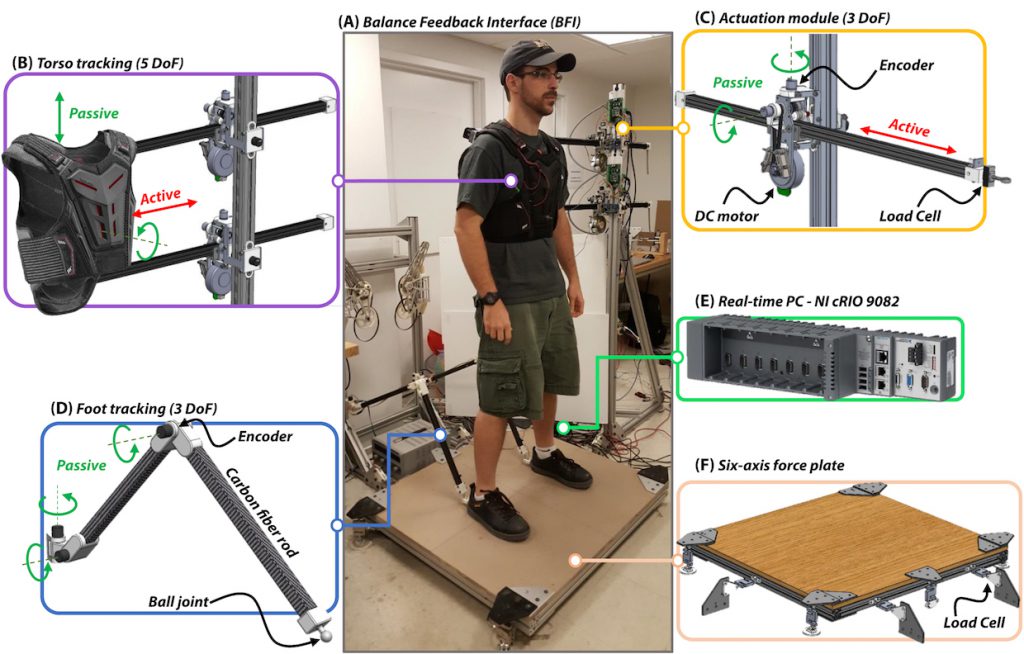
ما در حال ساختن یک سامانهی تله رباتیک هستیم که دو بخش دارد: بخش انسانی که قادر به انجام رفتارهای هوشمند و پویاست و نوع جدیدی از رابط کاربری دوطرفهی انسان و ماشین که حرکات شما را به سمت ربات و حرکات ربات برای شما ارسال میکند. بنابراین مثلا اگر ربات روی آوار رفته و شروع به از دستدادن تعادل خود کند، کاربر نیز همان بیثباتی را احساس میکند و بطور غریزی واکنش نشان میدهد تا از سقوط خودداری کند. سپس آن پاسخ فیزیکی را ذخیره میکنیم و آن را به ربات ارسال میکنیم که به جلوگیری از سقوط آن کمک میکند. از طریق این پیوند انسان و ربات، این ربات میتواند مهارتهای ذاتی حرکتی کاربر و عکسالعملهای آنی را مهار کند تا جای خود را حفظ کند. میتوان گفت ما مغز انسان را درون دستگاه قرار میدهیم.
در ویدئوی زیر فیلمهای بیشتری از آزمایشها وجود دارد که نشان میدهد HERMES کوچک در حال قدمزدن و پریدن در محل، گام برداشتن به جلو و عقب و متعادل کردن خود است. تا پایان تماشا کنید تا اجرای آزمایشهای گام برداشتن در شرایط ناپایدار را ببینید.
حل یکی از چالش های اساسی در کارآمد کردن سامانه دورگردان
چالش این رهیافت در نقشه برداری صحیح از حرکات بدن انسان برای دستگاه و در عین حال آگاهکردن کاربر بطور همزمان از چگونگی بازتولید حرکات خود توسط ربات است. بنابراین، ما یک راهکار برای این سیاست بازخورد دوجانبه پیشنهاد کردیم تا یک ربات دوپایه را طوری کنترل کنیم تا بتواند با یک کاربر انسانی قدم به قدم برداشته، پرش کند و در هماهنگی کامل گام بردارد. چنین هماهنگی پویایی بوسیلهی (الف) مقیاسبندی اجزای اصلی دادههای حرکتی انسان به نسبت ربات بطور آنی و (ب) اعمال نیروهای بازخوردی به کاربر که متناسب با سرعت نسبی بین انسان و ربات است، بدست آمده است.
HERMES کوچک اکنون نخستین قدمهای خود را به معنای واقعی کلمه برداشته است. اما پژوهشگران میگویند امیدوارند از پاهای رباتیک با طراحی مشابه به عنوان بخشی از یک ربات انسان نمای پیشرفتهتر استفاده کنند. یک احتمال که آنها پیش بینی کردهاند ساخت یک ربات چهارپای سریع است که میتواند انواع مختلف ناهمواری زمین را طی کند و سپس به یک ربات دوپا تبدیل شود که از دستهای خود برای انجام دستکاریهای دشوار استفاده کند. این برنامه میتواند شامل ادغام برخی از رباتهایی باشد که پژوهشگران MIT در آزمایشگاه خود تاکنون ساختهاند، یعنی احتمالاً ایجاد هیبرید بین یوزپلنگ و HERMES یا Mini Cheetah و HERMES کوچک. باید دید رباتهای بدست آمده چگونه خواهند بود.
مطالب بیشتری را در زیر بخوانید:
>>پوستی مصنوعی که به قلقلک واکنش نشان می دهد
>>توانبخشی رباتیک و فناوریهای کمکی برای تحول در فیزیوتراپی
>>موسسه ی پژوهشی تویوتا : ارتقای ربات های خدماتی با شبیه ساز واقعیت افزوده
منبع: spectrum
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجلهی فناوریهای توانافزا و پوشیدنی) مجاز است»