سارا هنسلی در تلاش است تا پیشرفتهترین ربات انسان نمای زمین را برای سفر به سیاره سرخ و انجام مأموریت بهبود ببخشد: با ربات فضانورد Valkyrie آشنا شوید.
 سارا هنسلی در حال آماده سازی یک ربات فضانورد به نام Valkyrie برای انجام مأموریت در مریخ است. این ربات ۶ فوت قد و ۳۰۰ پوند وزن دارد. هنسلی مقدار زیادی از وقت خود را صرف تجزیه و تحلیل حرکت دستهای Valkyrie کرده است.
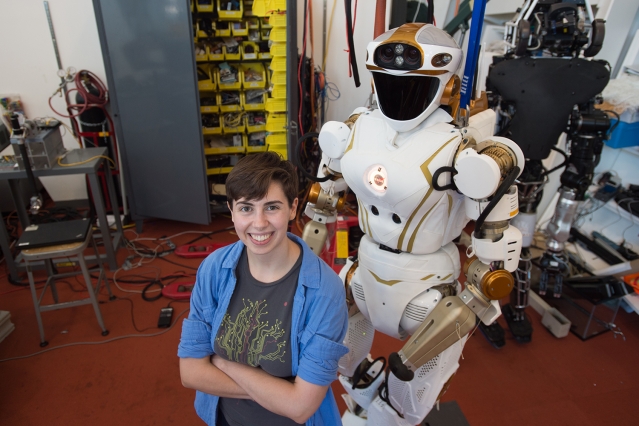
سارا هنسلی در حال آماده سازی یک ربات فضانورد به نام Valkyrie برای انجام مأموریت در مریخ است. این ربات ۶ فوت قد و ۳۰۰ پوند وزن دارد. هنسلی مقدار زیادی از وقت خود را صرف تجزیه و تحلیل حرکت دستهای Valkyrie کرده است.
هنسلی، دانشجوی سال چهارم مهندسی برق در دانشگاه MIT به همراه گروهی از پژوهشگران در تلاش برای آماده سازی Valkyrie است. ربات فضانورد Valkyrie یک ربات انسان نما است که به عنوان R5 شناخته شده و برای مأموریتهای فضایی آینده مورد استفاده قرار خواهد گرفت. هنسلی به عنوان یک نوجوان در نیوجرسی علاقه زیادی به مطالعه در اوقات فراغت و به ویژه کتابهای کلاسیک ربات آیزاک آسیموف دارد. او میگوید: «من علاقه زیادی به داستانهای علمی و تخیلی دارم و این عالی است که در حال حاضر با یک ربات واقعی کار میکنم.»
هنسلی و دو دانشجوی مقطع کارشناسی در گروه حرکت ربات در آزمایشگاه علوم رایانه و هوش مصنوعی دانشگاه MIT در حال مطالعه Valkyrie برای یک برنامه تحقیقاتی مستقل پیشرفته یا SuperUROP هستند. بسیاری از همکاران او پژوهشگرانی در سطح تحصیلات تکمیلی و دانشجویان مقطع فوق دکترا با تجربه گسترده کار بر روی رباتهای انسان نمای پیچیده هستند. این گروه توسط استاد مهندسی برق و رایانه، راس تدراک رهبری میشود. وی نسخه قبلی Valkyrie (به نام اطلس) با قابلیت باز کردن درب، چرخاندن دریچه، ایجاد حفره، بالا رفتن از پله و رانندگی برای چالش رباتیک دارپا در سال ۲۰۱۵ را با موفقیت برنامهریزی کرده است.
هنسلی میگوید: Valkyrie دارای ۲۸ مفصل کنترل گشتاور، چهار دوربین بدن و بیش از ۲۰۰ حسگر فردی است. این ربات قادر به راه رفتن، خم کردن مفاصل و چرخاندن دستگیره است. وی اضافه میکند: «این ربات یکی از پیشرفتهترین رباتهای جهان است».
Valkyrie راه درازی برای رفتن به مریخ پیش رو دارد. دانشگاه MIT، دانشگاه شمال شرقی و دانشگاه ادینبورگ سه نهادی هستند که ناسا برای توسعه نرم افزارهایش انتخاب کرده تا رباتها قادر باشند وظایف مرتبط با فضا مانند باز کردن دریچه هوا، ضمیمه و حذف کابل برق، تعمیر تجهیزات و نمونهبرداری را انجام دهند.
هنسلی که کار در آزمایشگاه را از تابستان آغاز کرده، شیفته چالش هماهنگ کردن حرکات این سیستم بسیار پیچیده است. او میگوید: «من در تلاش هستم تا یک مشکل بسیار پیچیده را حل کنم». او روی بهترین روش کنترل حرکات آرنج Valkyrie از طریق مقایسه دو روش بالقوه کار میکند. یک روش، استفاده از کنترل کننده اصلی برای جمعآوری اطلاعات از سامانه موتورهای مختلف داخل دست و سپس استفاده از این اطلاعات برای تصمیمگیری حرکت دقیق است. رویکرد دیگر غیر متمرکز است و در آن هر یک از سامانههای موتور، تصمیم گیری و عمل خود را دارد.
هنسلی میپرسد: «آیا این بهتر است که تصمیم گیرندگان متعدد با دسترسی به اطلاعات مختلف داشته باشیم؟ یا یک تصمیم گیرنده با دسترسی به همه ورودیهای موتور؟» هنسلی در حال حاضر در مقطع کارشناسی ارشد رشته مهندسی برق در دانشگاه MIT پذیرفته شده و امیدوار است قادر به ادامه کار خود روی ربات فضانورد Valkyrie باشد.
هنسلی هر روز خانه خود در Back Bay را ترک و تا آزمایشگاه پیادهروی میکند. او خود را به دو نمایشگر بزرگ در آزمایشگاه رباتیک میرساند و کدهایی برای شبیهسازی معادلات حرکات دست ربات مینویسد.
هنسلی میگوید یک چیز قطعی است. فرهنگ عامه نگران است که ماشینها برتر از انسان شوند و این خندهدار است. وی ادامه میدهد: «هنگامی که Valkyrie روشن شده و حرکت میکند، اغلب اوقات به نوعی میلرزد و میافتد. چیزی که شما هنگام کار در این آزمایشگاه متوجه آن میشوید این است که از تکامل رباتها فاصله زیادی داریم و مشکل ما این است که رباتها گاهی اوقات کار میکنند و گاهی اوقات کار نمیکنند».
منبع: MIT News


