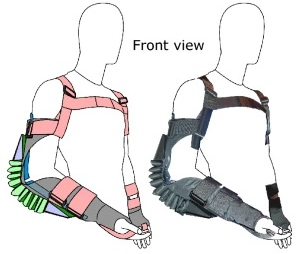
اسکلت بیرونی پنوماتیک آرنج موجب کاهش فعالیت عضلات و خستگی هنگام حمل بار میشود
برای به حداقل رساندن خستگی، پایداری کار و کاهش خطر صدمات، اسکلت بیرونی Carry ساخته شد. Carry ترکیبی از یک رابط نرم انسان و ماشین و عملکرد پنوماتیک برای کمک به آرنج در نگه داشتن و حمل بار است. نتایج یک آزمایش نشان داد این اسکلت بیرونی فعالیت عضلانی را تا ۵۰٪، متابولیسم خالص تا ۶۱٪ و خستگی را تا ۹۹ ٪ کاهش میدهد. مزایای قابل توجه Carry نشان میدهد این دستگاه…








