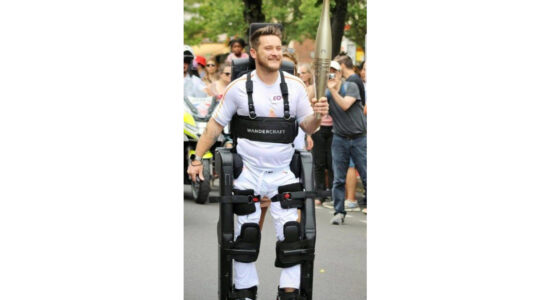
مشعل المپیک 2024 توسط ورزشکار پاراپلژیک با ربات اسکلت بیرونی حمل شد
برای اولین بار است که یک ورزشکار پاراپلژیک با استفاده از ربات اسکلت بیرونی مشعل المپیک را حمل کرده است. کوین پیت، پارا ورزشکار فرانسوی، روز سهشنبه 23 جولای شعله آتش را در مقابل معبد هرا در المپیای باستانی یونان حمل کرد. حدود 11 سال پیش، یک تصادف باعث فلج شدن ستاره تنیس فرانسوی شد. اما او به عنوان یک پارا ورزشکار به بازی بازگشت. اکنون کلیپی از ستاره تنیس پارا المپیک…