این ربات برنده رقابتهای رباتیک DARPA در سال ۲۰۱۵ شده است.
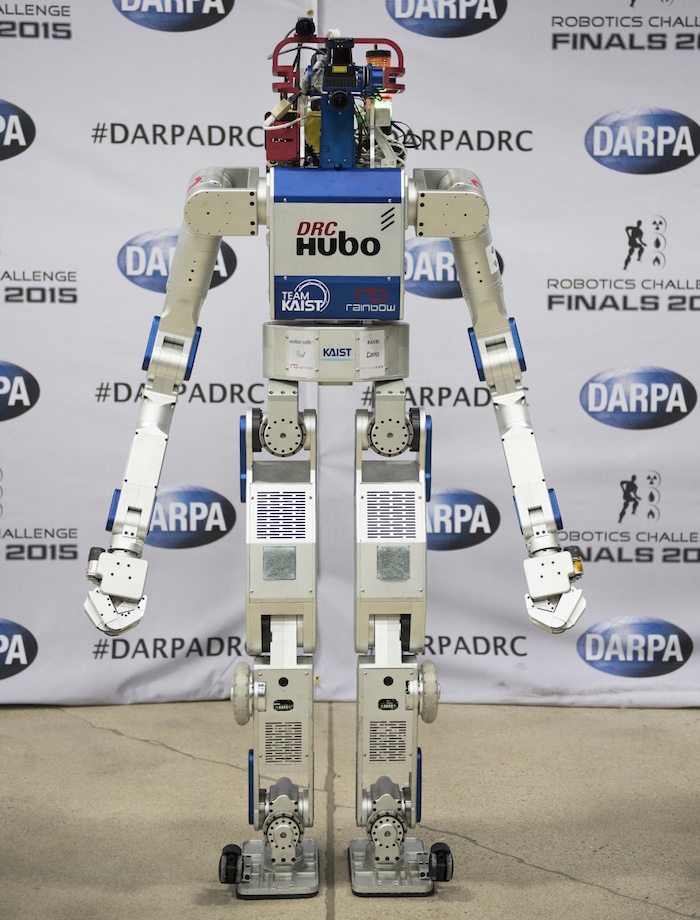
گروه KAIST از کره جنوبی پس از آنکه ربات انساننمای سازگارشوندۀ آنها با نام DRC-HUBO، تعداد ۲۲ ربات دیگر از ۵ کشور را شکست داد پیروز رقابت رباتیک DARPA در Panoma کالیفرنیا اعلام شد و برندۀ جایزۀ ۲۲ میلیون دلاری شد. توانایی تبدیل از یک ربات راه رونده بر روی دوپا به یک ماشین چرخدار و برعکس، کلید موفقیت این ربات بود. بسیاری از رباتها به جز DRC-HUBO هنگام تلاش برای انجام وظایفی مانند باز کردن در یا بکار بردن مته تعادل خود را از دست داده و به زمین افتادند. طراحی منحصر به فرد این ربات، به آن اجازه داد تا وظایف را سریعتر انجام دهد و از آن مهمتر روی دوپا و چرخهای خود بایستد.
Jun Ho Oh استاد رشته مهندسی مکانیک در موسسۀ علم و فناوری پیشرفتۀ کره و رهبر گروه KAIST به IEEE Spectrum گفت: «هنوز پیاده روی رو دو پا برای رباتها خیلی پایدار نیست. یک اشتباه کوچک نتیجهای فاجعه بار در پی خواهد داشت». او گفت یک ربات با شکل انساننما هنگام عملکرد در محیطهای انسانی مزیتهایی دارد اما وی به دنبال طرحی برای کمینه کردن احتمال افتادن بوده است. «من به روشهای گوناگون فکر کردم و سادهترین راه، بکار بردن چرخ در زانوها بود».
DRC-HUBO میتواند حالت خود را تغییر دهد؛ ایستاده روی دوپا برای راه رفتن و دسترسی به اشیای بلندتر یا زانو زده برای حرکت روی چرخها در شرایطی پایدار
DARPA پس از حادثه فوکوشیمای ژاپن تصمیم به برگزاری رقابتهای DRC گرفت به این امید که باعث پیشرفت در عرصۀ رباتهای امدادی شود. دور نهایی رقابت DRC برای گروهی از رباتهای نیمه خودکار و کاربران انسانی در نظر گرفته شده بود تا در محیط شبیهسازی شدۀ یک حادثه در کنار یکدیگر کار کنند. رباتهایی که دانشگاهها و شرکتها برای این رقابت ساخته بودند از لحاظ اندازه و ظاهر بسیار با یکدیگر تفاوت داشتند و رباتهای پادار ، رباتهای چرخدار و رباتهای ترکیبی را در بر میگرفتند.
DRC-HUBO به دلیل انجام کامل و بدون وقفۀ تمام هشت وظیفۀ تعیین شده در کمترین زمان (۴۴ دقیقه و ۲۸ ثانیه)، توانست بر دیگر رباتها غلبه کند. گروههای دیگر نیز در رقابت عملکرد مناسبی داشتند اما موانع باعث شد تا رباتهای آنها زمان را از دست بدهد. تعدادی از این گروهها عبارتند از:
- ربات گروه Tartan Rescue به نام CHIMP با پاها و بدنهای تانک مانند و تنها رباتی که پس از افتادن دوباره بلند شد.
- Momaro ساختۀ دانشگاه Bonn که یک ماشین چرخدار ساده و زیبا با سر چرخنده و دو بازو بود.
- ربات RoboSimian ساختۀ آزمایشگاه نیروی محرکه جت ناسا، یک ربات چهارپا که به نظر میرسید حرکات یوگا انجام میدهد.
- ربات گروه IHMC به نام ATLAS که یک ربات انساننمای هیدرولیکی- الکتریکی ساختۀ شرکت Boston Dynamics بود.

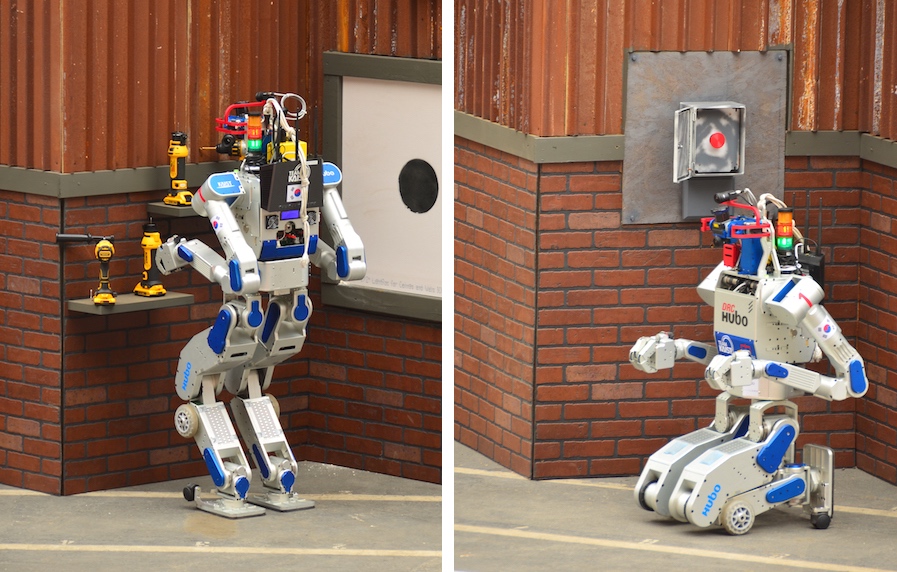
DRC-HUBO در حال انجام ماموریت شیر آب، توجه کنید که بالاتنۀ آن ۱۸۰ درجه چرخیده است.
Gill Prat مدیر برنامه DARPA و برگزار کننده رقابت DRC در نشست رسانهای درباره طرحهای گوناگون ربات اظهار داشت: «انعطافپذیری ممکن است مهمترین عامل باشد». او توضیح داد اگر چه ممکن است رباتی که قادر به تغییر پیکربندی خود از حالت پادار به حالت چرخدار باشد، سنگینتر و پیچیدهتر باشد اما «انعطافپذیری لازم را فراهم میکند».
دکتر Oh یک کارشناس شناخته شده در زمینه رباتهای انساننما است. او و دانشجویانش در موسسه علوم و فناوری پیشرفته کره جنوبی (KAIST) در شهر Daejeon، مشغول بهبود پلتفرم HUBO طی چندین نسل هستند. فیلم زیر مربوط به چند سال پیش و زمانی است که دکتر Oh، آزمایشگاه خود و ربات HUBO2 را نمایش میدهد.
برای دور نهایی DRC دکتر Oh تصمیم گرفت با توجه به وظایفی که ربات با آنها روبرو میشد تغییرهایی چشمگیر روی آن اعمال کند. در کارگاهی پس از رقابت او گفت DRC-HUBO «چیز ویژهای نبوده و تنها یک ربات انساننماست». ولی در واقع گروه او در KAIST تقریباً تمام قسمتهای ربات را به صورت سفارشی طراحی کرده و ساختهاند. او هزینه هر ربات انساننما را میان ۵۰۰۰۰۰ تا ۱ میلیون دلار تخمین زد. برخی از ویژگیهای کلیدی که به ربات در پیروزی در رقابت کمک کردند عبارتند از:
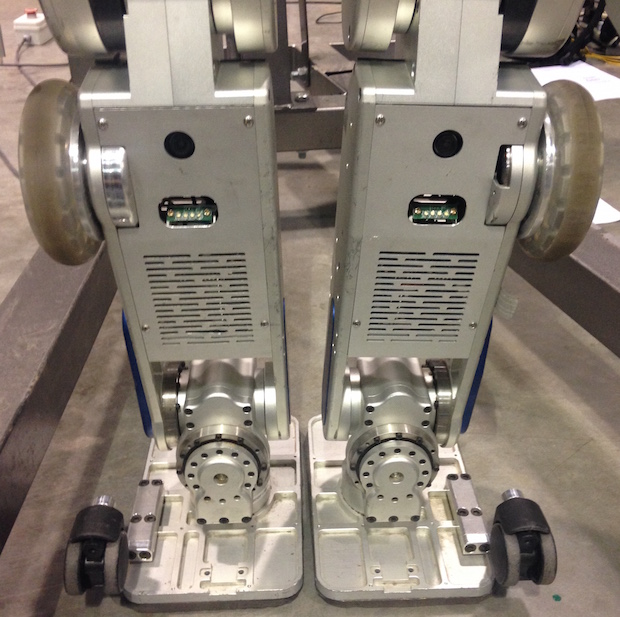
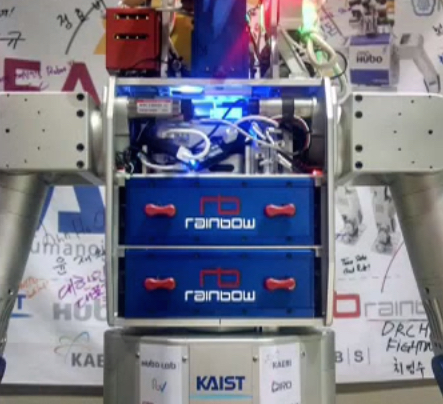
- چرخهای روی زانوها: DRC-HUBO دارای چرخهایی موتوردار روی هر دو زانو و چرخهایی کوچک روی پاهای خود است.

ربات دارای چرخهایی روی هر دو زانو و چرخهایی کوچک روی پاهای خود است. سوراخهای بیضوی روی ساق پا حسگرهای نوری برای مسافت سنجی است.
چرخها به ربات اجازه میدهد با سرعت و در شرایط پایدار به اطراف حرکت کند. ربات هنگام غلتیدن روی زمین، حسگرهای نوری روی ساق پا را برای سنجش مسافت طی شده بکار میگیرد.
- موتورهای قدرتمند: همانند SCHAFT، رباتی که برندۀ دور مقدماتی رقابت DARPA شد و توسط گوگل خریداری شد، DRC-HUBO توان زیادی از موتورهای خود میگیرد (این ربات دارای ۳۱ درجۀ آزادی و ۳۳ موتور است). با درایورهای سفارشی شده و سامانۀ خنککنندۀ هوا (فنها و پرهها)، این ربات میتواند جریانی سه تا چهار برابر بیشتر از مقدار تعیین شده در مشخصههای موتور جریان بکشد که در برخی موارد بیشینۀ آن به ۳۰ آمپر میرسد.
- فرمانپذیری: گروه میخواست ربات خود را فرمانپذیر سازد ولی نمیخواست حسگرهای نیرو-گشتاور و کنترلکنندههای بازخوردی مرسوم (که میترسیدند باعث ناپایداری شود) را بکار

سامانۀ خنککنندۀ هوا در قسمت بالایی و پایینی پای ربات اجازه میدهد توان بیشتری از موتورها گرفته شود.
گیرد. آنها به جای آن فرمانپذیری را با بکارگیری تقویتکنندهای ویژه روی درایور سفارشی موتور اجرا کردند.
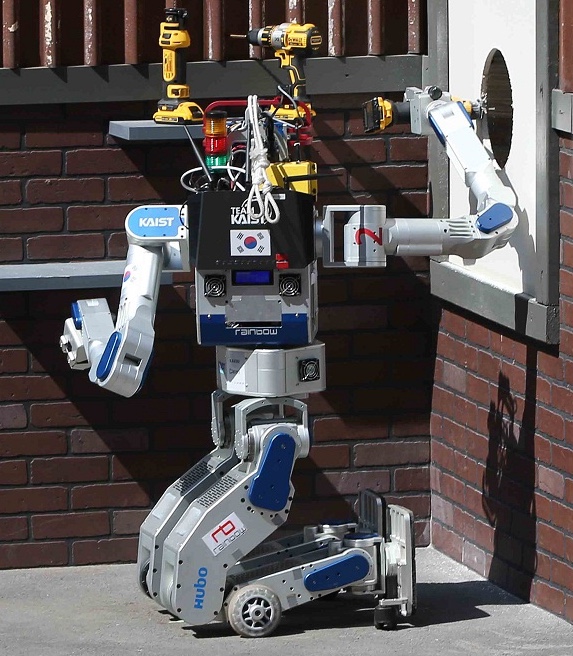
- نیمتنه چرخان: ربات DRC-HUBO میتواند بالاتنۀ خود را تا ۱۸۰ درجه بچرخاند. این به این معنی است که زانوهای ربات میتواند رو به جهتی باشد و چشمان رباتی به جهتی کاملاً مخالف نگاه کند (امتحان کنید!). این قابلیت در هر دو حالت ایستاده و زانو زده کار میکند و ربات در طول انجام چندین وظیفه مانند رانندگی وسیله نقلیه، برش دیوارها، هل دادن سنگ و بالا رفتن از پله به آن متکی بود.
- بازوهای بلند: گروه KAIST فهمیدند که بازوهای HUBO2 برای انجام برخی وظایف بسیار کوتاه بود، بنابراین آنها بازوهایی بلندتر با ۷ درجۀ آزادی برای DRC-HUBO طراحی کردند.

بالاتنۀ ربات میتواند تا ۱۸۰ درجه بچرخد که قابلیتی کاربردی است.
همچنین برای جلوگیری از پاره شدن کابلها، آنها را داخل بازوها جای دادند. هر بازو میتواند تا ۱۵ کیلوگرم را نگه دارد و همچنین دارای پنجهای تطبیقی و توانمند برای گرفتن اجسام نرم و سخت است.
- سنجش سادهشده: به جای داشتن سری آکنده از حسگرها و دوربینهای استریو و لیداری (LIDAR) که به طور پیوسته محیط را اسکن کند(برای نمونه استفاده شده در ربات ATLAS اطلس)، DRC-HUBO سامانۀ بینایی ساده شدهای را بکار میبرد. بیشتر زمانها ربات متکی به کاربر است و لیداری که به یک موتور متصل شده است تنها در مواقع لزوم محیط را اسکن میکند. یک دانشجوی KAIST به ما گفت در واقع به نظر میرسد ربات سر نداشته و «فقط چشمها» را دارد.
- توان مقاوم: هنگامی که موتورها جریان بسیاری میکشند ممکن است سامانۀ اصلی توان قادر به تأمین توان کافی برای اجزای حیاتی نباشد. برای جلوگیری از این مورد، سامانۀ ابرخازنی را

بالاتنه به رایانهای برای حرکت و رایانهای دیگر برای بینایی، ژایروسکوپها و باتریها مجهز شده است
بکار گرفتند که حتی اگر سامانۀ اصلی توان خاموش شود، رایانهها، دستگاههای ارتباطی و برخی حسگرها مانند ژایروها را فعال نگه دارد.
- نرمافزار سفارشی: این گروه چارچوب توسعۀ زمان واقعی Xenomai را برای لینوکس و چارچوب کنترل حرکتی سفارشی توسه داده شده در KAIST به نام PODO را بکار بردهاند. آنها همچنین از محیط شبیهسازی Gazebo استفاده کردهاند. گروه نرمافزار خود را با تمرکز بر ذات ناپایدار و با پهنای کم ارتباطها میان ربات و کاربر طراحی کردند.

حال اجازه دهید نگاهی نزدیکتر داشته باشیم به عملکرد DRC-HUBO در هشت مأموریتی در این رقابت که باعث پیروزی گروه KAIST شد.
- ماموریت رانندگی: گروهها اجازه داشتند تغییراتی خاص روی خودروی Polaris اعمال کنند تا رباتهایشان بتوانند به راحتی آن را برانند یا از آن خارج شوند. گروه KAIST ابزاری فلزی با دو اهرم را روی کف خودرو قرار داد. هنگامی که DRC-HUBO یکی از اهرمها را فشار میداد، یک سامانۀ کابلی باعث میشد تا اهرم دوم پدال گاز را فشار دهد. ربات با دست چپ، خود را روی خودرو نگه میداشت و با دست راست فرمان را میچرخاند. ربات این مأموریت را بسیار بسیار سریع به پایان رساند(کمی بیشتر از یک دقیقه) و بر خلاف دیگر گروهها هنگام عبور از موانع توقف نداشت.
- مأموریت خارج شدن: این یکی از سختترین مأموریتها در رقابت بود. دکتر Oh گفت که هنگام برنامهریزی برای این مأموریت، خود چندین مرتبه وارد خودرو شده و از آن خارج شده است تا ببیند نیاز است چه نوع حرکتها و چه اعضایی از بدنش را بکار گیرد. او نتیجه گرفت که رویکردی دینامیکی مورد نیاز بود. گروه او DRC-HUBO را برنامهریزی کردند تا دستانش را بالا برده و چارچوب خودرو را نگه دارد. سپس ربات نیرویی ۱۰۰ نیوتونی به هر بازو اعمال میکند. هنگامی که بازوها بدن ربات را بالا میکشند، تا حد زیاد و البته به شیوهای کنترل شده به بیرون از خودرو میافتد. دکتر Oh گفت گروه برای تکمیل این حرکت چندین موتور را سوزاندند اما مشکل را با درایورهای موتور پرقدرت سفارشی حل کردند. در اجرای واقعی، ربات میتواند در کمتر از ۴ دقیقه بیرون بیاید و پس از پیاده شدن از خودرو زانو زده و با سرعت دور میشود.
- مأموریت عبور از در: بر خلاف چندین ربات دیگر که برای انجام این مأموریت باید میایستادند (و تعادل خود را روی دو پا حفظ میکردند)، DRC-HUBO توانست روی زانوهای خود قرار گرفته و دستگیرۀ درب را بچرخاند. ربات به طرز زیبایی دست دیگر خود را برای باز نگهداشتن در هنگام رهاسازی دستگیره بکار برد. در کمتر از ۲ دقیقه روی چرخهای زانوی خود از در عبور کرد.
- مأموریت شیر آب: توجه کنید که در ابتدای فیلم چگونه لیدار (LIDAR) به بالا و پایین حرکت میکند تا اسکنی از صحنۀ پیش رو در اختیار کاربر قرار دهد. سپس هنگامی که DRC-HUBO به شیر آب میرسد بالا تنۀ خود را ۱۸۰ درجه میچرخاند. به ثانیه بیستم توجه کنید در غیر اینصورت آن را از دست میدهید (متأسفانه زاویه دوربین پایینتنه ربات را نشان نمیدهد). در این پیکربندی، در حالی که هنوز زانو زده است، ربات بدنش را به اندازه کافی بلند میکند تا بتواند بهتر شیر آب را بچرخاند. ربات چند اسکن لیداری بیشتر انجام داده، موقعیت خود را تنظیم میکند و در کمتر از سه دقیقه مأموریت را انجام میدهد. توجه کنید که تنها یک چرخش کامل کافی است اما DRC-HUBO دو چرخش کامل انجام میدهد. در زمان ۲:۰۱ از فیلم میتوانید ببینید که ربات چرخش بالاتنه را به عقب بر میگرداند.
- مأموریت دیوار: این یک کار دشوار برای بیشتر گروهها بود چون نیازمند گرفتن دقیق مته برقی بود و ربات میبایست برای بکارگیری ابزار، ماشه یا دکمه روشن-خاموش را فشار میداد. DRC-HUBOروی حسگر نیرو-گشتاور روی هر دست خود برای کمک به گرفتن ابزار تکیه کرد. میتوانید ببینید که ربات خود را حرکت میدهد و حتی متۀ برقی را روی قفسهها جابجا میکند (حتی متۀ برقی دیگری را از سر راه کنار میاندازد) تا راهی مناسب برای برداشتن آن پیدا کند. هنگامی که ربات ابزار را در دست گرفت، کاربر محل بریدن را تعیین کرده و ربات مابقی کار را به صورت خودکار انجام میدهد. ربات نیرویی ۲۰ نیوتونی را روی دیوار نگه میدارد و میتوانید ببینید چگونه از تمام بدن خود برای حرکت متۀ برقی در یک دایره عالی استفاده میکند. انجام این مأموریت ۱۱ دقیقه زمان میبرد.
- مأموریت نامعین: مأموریت نامعین شامل بیرون آوردن یک دوشاخه و فرو کردن آن در سوکتی دیگر بود. توجه کنید که DRC-HUBO چگونه کف زمین را اسکن میکند و توجه کنید متۀ برقی که پیشتر زمینانداخته بود سر راهش قرار گرفته است. ربات میچرخد و با زانوهایش ابزار را کنار میزند. سپس تلاش میکند تا برگردد ولی به نظر میرسد با دیوار برخورد میکند. ظاهراً کاربر متوجه مشکل شده و کمی آن را به جلو هدایت میکند سپس میتواند بچرخد. در نهایت آن ها به دیواری میرسند که دوشاخه روی آن قرار دارد و در موقعیتی بالاتر از دستگیرۀ در و شیر آب قرار دارد. زمان آن رسیده که روی پاهایش بایستد. میتوانید تماشا کنید که این اتفاق در زمان ۳:۰۵ از فیلم آغاز میشود. DRC-HUBO چند گام به جلو بر میدارد و پس از مدتی فرآیند گرفتن را شروع میکند. ربات دوشاخه را با سیمش میگیرد. ما معتقدیم این کار عمدی بوده است تا به کاربران اجازه دهد بهتر دوشاخه را ببینند و از اینکه دست ربات مانع دید آنها شود اجتناب کنند که انجام مأموریت را تقریبا غیر ممکن خواهد ساخت. فرو کردن دوشاخه دشواری کار را اثبات میکند و در زمان ۷:۴۷ از فیلم میتوانید ببینید ربات چگونه تلاش میکند آن را به داخل هل دهد اما وارد سوکت نمیشود. پس از چند حرکت اصلاحی موفق میشود! این مأموریت ۱۳ دقیقه و ۳۰ ثانیه طول کشید که کندترین در طول رقابت بود.
- مأموریت آوار: هنگامی که زانو زده است، DRC-HUBO میتواند با زانوهایش که رو به جلو هستند حرکت کند یا میتواند بالاتنه خود را ۱۸۰ درجه بچرخاند و در حالی که پاهایش رو به جلوست حرکت کند و به عنوان تیغه بولدوزر عمل کند و این کاری است که برای این مأموریت انجام میدهد. در زمان ۰:۲۸ از فیلم میتوانید ببینید که چرخش بالاتنه شروع میشود. بسیار جالب است. سپس ربات دستان خود را بلند میکند که احتمالاً برای پایداری و جلوگیری از بریده شدن توسط آوارهاست. پس از آن شخم زدن آوار را شروع میکند. هنگامی که به نظر میرسد قطعه چوبی میان تودۀ خاکستر گیر کرده است ربات برای لحظاتی از کار دست میکشد، کمی به چپ میچرخد تا آن را از سر راه بردارد. سپس لولۀ پلاستیکی را به سمت راست حرکت میدهد. در زمان ۴:۱۴ یکبار دیگر بالاتنه خود را میچرخاند و خود را روبروی پلهها قرار میدهد. انجام مأموریت کمتر از ۵ دقیقه زمان برد.
- مأموریت پلهها: دکتر Oh گفت که برای بسیاری از مأموریتها به ویژه بالا رفتن از پلهها مهم است که ربات بتواند پاهای خود را ببیند. رباتهای بزرگ مانند ATLAS برای انجام این کار دچار مشکل میشوند و باید بدن خود را خم کنند که حفظ تعادل را سختتر میکند. ربات DRC-HUBO این مشکل را با روشی بسیار هوشمندانه حل میکند. این ربات رو به عقب از پلهها بالا میرود. با این کار زانوهایش مانع دوربینها برای دیدن پاها و زمین نمیشوند و برتری دیگر اینست که ساق پایش هیچگاه هنگام خم کردن پا با پله برخورد نمیکند. اما اگر او رو به عقب از پلهها بالا میرود چگونه پاهای خود را میبیند؟ البته که با چرخاندن بالاتنه! میتوانید ببینید که فرآیند در زمان ۰:۲۶ از فیلم آغاز میشود. ربات مقابل پلهها زانو زده و ناگهان پشت خود را به سمت آن میچرخاند. سپس میایستد و در زمان ۰:۵۵ میتوانید ببینید که بالاتنه خود را ۱۸۰ درجه میچرخاند. حال میتواند پلهها را اسکن کند و شروع به بالا رفتن میکند. اما توجه کنید پیش از بالا رفتن، دو گام به کنار به سمت چپ بر میدارد! پس از دو دقیقه در نهایت ربات در حرکتی پیوسته شروع به بالا رفتن از سه پلۀ آخر پایانی میکند. در کمتر از ۷ دقیقه DRC-HUBO در بالای چارچوب قرار دارد. این فیلم صدا ندارد اما در این لحظه گروه و تماشاگران فریاد شادی سر میدهند.
KAIST چهار ربات DRC-HUBO ساخت و طی یک ماه پیش از رویداد بدون کابلهای ایمنی تمرین کرده بود. آنها آزمایشهای خود را بیرون از ساختمان، در پارکینگ با زمین خشن و تحت شرایط گوناگون مانند نور شدید خورشید و بادهای شدید انجام دادند. دکتر Oh در کارگاه پس از مسابقه گفت: «اگر [کابلهای] ایمنی را حذف نمیکردیم، کاربران بسیار ترسو میشدند».
او افزود که در طول تمرین، آنها همه مأموریتها را با ربات در دو حالت ایستاده و زانوزده تکمیل کردند (زمان میانگین آنها حدود ۳۰ دقیقه بود). گروه به خصوص در کنار زدن آوار با بازوهای DRC-HUBO عملکرد خوبی داشت، کاری که فرصت نمایش آن را در دور پایانی DRC پیدا نکرد. همچنین آنها توانستند مأموریتهایی دشوارتر از مأموریتهای رقابت DRC را انجام دهند.
دکتر Oh و گروهش پیروزی خود در DRC را جشن میگیرند.
>> در همین زمینه بخوانید: ربات سفارشی گروه WALK-MAN برای دور نهایی رقابتهای رباتیکی DARPA
منبع: IEEE Spectrum


