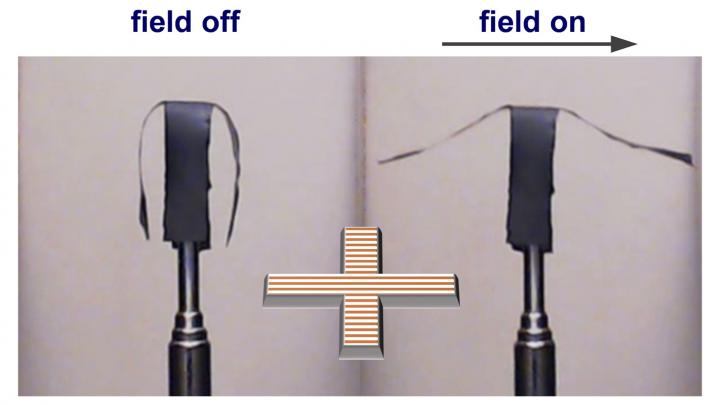
این تصویر یک تحریک انتخابی از بازوهای جانبی یک ربات منعطف را در میدان مغناطیسی یکنواخت افقی نشان میدهد.
پژوهشگران دانشگاه ایالتی کارولینای شمالی روشی برای بکارگیری زنجیرهای از نانوذرات مغناطیسی را برای دستکاری پلیمرهای کشسان در سهبعد توسعه دادهاند که میتواند در کنترل از راه دور رباتهای منعطف نوین بکار گرفته شود.
توانایی کنترل حرکت رباتهای منعطف همراه با انعطافپذیری آنها، کاربردهای بالقوهای از فناوریهای پزشکی تا فرآیندهای ساخت و تولید به این رباتها میدهد. پژوهشگران علاقهمند به بهرهگیری از میدان مغناطیسی برای کنترل حرکت این رباتهای منعطف هستند چرا که قابل انجام از راه دور است (کنترل میتواند بدون اتصال فیزیکی به پلیمر اعمال شود) و همچنین میدانهای مغناطیسی به آسانی از آهنرباهای دائمی و آهنرباهای الکترومغناطیسی به دست میآیند.
اکنون گروهی از پژوهشگران راهی یافتهاند تا زنجیرهای از ذرات مغناطیسی در مقیاس نانو را در ورقهای از پلیمر کشسان ادغام کنند تا یک نانوکامپوزیت پلیمری مغناطیسی را ایجاد کنند. این پژوهشگران م%N2توانند با اعمال میدان مغناطیسی خم شدن نانوکامپوزیت را کنترل کنند که این کار آن را به یک ربات منطعف تبدیل میکند.
این فرآیند با پخش کردن نانوذرات مغناطیسی (اکسیدی از آهن) در یک محلول آغاز میشود. سپس پلمیری در این ترکیب حل شده و برای بدست آمدن شکل مورد نظر در قالبی ریخته میشود. پس از آن یک میدان مغناطیسی اعمال میشود تا نانوذرات مغناطیسی در زنجیرههایی موازی قرار گیرند. با خشک شدن این محلول، نانوذرات در جای خود ثابت میشوند و نانوکامپوزیت پایانی میتواند برای اصلاح شکل بریده شود.
Sumeet Mishra دانشجوی دکتری دانشگاه ایالتی کارولینای شمالی و مولف اصلی مقالۀ این کار، میگوید:
«با بکارگیری این روش، میتوانیم نانوکامپوزیتهای بزرگی در شکلهای گوناگون بسازیم که میتوانند از راه دور دستکاری شوند. زنجیرۀ نانوذرات پاسخی بهبود یافته به ما میدهد و با کنترل قدرت و جهت میدان مغناطیسی، میتوانید میزان و جهت حرکتهای ربات منعطف را کنترل کنید.»
این سازوکار از ساختار زنجیره ناشی میشود. همچنین این پژوهشگران مدلی ساده ساختهاند تا شیوۀ اثرگذاری زنجیرۀ نانوذرات بر پاسخ مکانیکی در میدان مغناطیسی را نشان دهد.
Joe Tracy دانشیار مهندسی علم مواد در دانشگاه ایالتی کارولینای شمالی میگوید:
«کلید کار در اینجاست که نانوذرات و دوقطبیهای آنها به صورت سر به دم قرار گرفتهاند بدین صورت که قطب مثبت یک نانوذرۀ مغناطیسی روبروی قطب منفی ذرۀ مغناطیسی دیگری قرار گرفته است و این روند ادامه مییابد. در عمل این کار ناهمسانگردی مغناطیسی نام دارد که باعث میشود نانوذرات به صورت زنجیر سرهم شوند. هنگامی که یک میدان مغناطیسی در هر جهتی اعمال میشود. زنجیر دوباره چنان جهتگیری میکند که تا حد امکان با میدان مغناطیسی موازی گردد که البته جاذبه و خاصیت کشسانی پلیمر آن را محدود میکنند.»
پژوهشگران بر این باورند که ممکن است این روش به ویژه برای برخی از کاربردهای زیست پزشکی در مقایسه با رباتهای منعطف وابسته به برق یا نور برای کنترل جذاب باشد. Mishra میگوید:
«کنترل الکتریکی میتواند مشکل ایمنی برای برخی کاربردهای پزشکی را افزایش دهد و هر دو سیگنال نوری و الکتریکی از نظر ارتباطشان با دستگاههای تعبیه شده در بدن چالشهایی را ایجاد میکنند.»
پژوهشگران میگویند این روش از مواد ارزان و به طور گسترده در دسترس بهره میبرد و این فرآیند برای اجرا نسبتاً ساده و آسان است.
مقالۀ این پژوهش با عنوان «Selective and Directional Actuation of Elastomer Films Using Chained Magnetic Nanoparticles» در مجلۀ انجمن سلطنتی شیمی با نام Nanoscale منتشر شده است. این مقاله تألیف Michael Dickey و Orlin Velev از دانشکدۀ مهندسی شیمی و زیست مولکولی دانشگاه ایالتی کارولینای شمالی است.
منبع: eurekalert.org


