مهندسان مکانیک Anne Martin و Bo Cheng، یادگیری ماشین و اسکلتهای بیرونی رباتیک را برای ارتقای راحتی کاربر ترکیب میکنند. ادامهی این خبر را در مجلهی فناوریهای توانافزا و پوشیدنی بخوانید.
برای درک، الگوسازی و بهینهسازی راحتی اسکلتهای بیرونی رباتیک اندام تحتانی، به پژوهشگران گروه مهندسی مکانیک Penn state مبلغ ۷۰۰۰۰۰ دلار کمک مالی از سوی بنیاد ملی علوم (NSF) اعطا شده است.
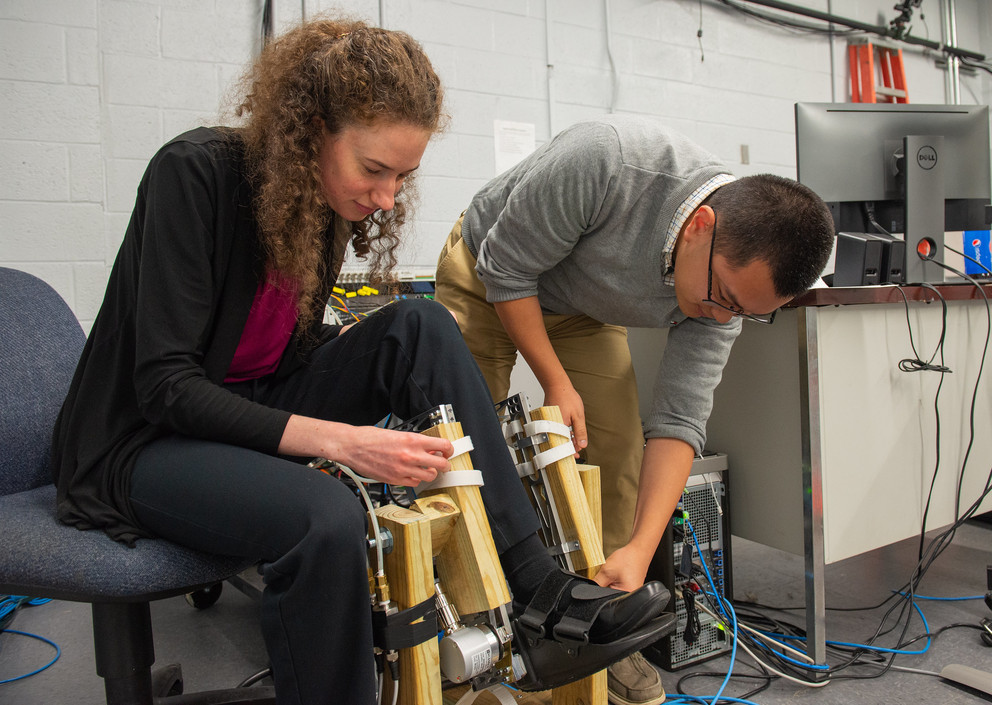
اسکلتهای بیرونی رباتیک دستگاههای پوشیدنی هستند که به حرکت افراد دارای معلولیت جسمی کمک میکنند. آنها همچنین در انجام وظایف دشوار فراتر از تواناییهای عادی انسانی کمک میکنند. در این پروژه، پژوهشگران بر روی اسکلتهای بیرونی اندام تحتانی – دستگاههای کمکی راه رفتن که بر روی پا پوشیده میشوند – متمرکز شدهاند تا به بیمارانی که از سکته مغزی و آسیبهای نخاعی رنج میبرند یا مبتلا به فلج مغزی هستند، کمک کنند.
اندازه گیری راحتی
Anne Martin، استادیار مهندسی مکانیک گفت: در زمینهی اسکلتهای بیرونی، همه اذعان میکنند که راحتی مهم است. اما هیچ کس آن را اندازهگیری نمیکند. البته شاید بخاطر اینکه هیچ راه مشخصی برای انجام این کار نیز وجود ندارد.
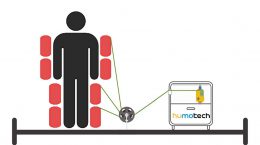
این پروژهی مشترک بوسیلهی اندازهگیری سیگنالهای فیزیولوژیکی که یک فرد به طور طبیعی اعلام میکند و مطابقت دادن آن مقادیر با احساس راحتی گزارش شده توسط فرد، به این موارد میپردازد. با استفاده از این دانش، پژوهشگران قصد توسعهی روشهای یادگیری ماشین را دارند تا به اسکلت بیرونی یاد بدهند چطور تنظیمات خود را برای راحتی بیشتر فرد هدایت کند.
در نهایت پژوهشگران قصد دارند تعاملی عمیقتر بین شخص و وسیلهی رباتیکی که پوشیده است برقرار کنند. با شروع راه رفتن و سازگار کردن راه رفتن خود با دستگاه، یادگیری ماشین تعبیه شده در رباتیک، خودش را برای راحتی بهینهی کاربر تنظیم میکند.
Bo Cheng، استادیار مهندسی مکانیک گفت: این کار یک آموزش مشترک خواهد بود – سازگاری متقابل ماشین و ذهن.
وضعیت فعلی فناوری
این کمک هزینه از یک برنامهی تازه معرفی شده در NSF به نام Mind, Machine and Motor Nexus (M3X) تهیه میشود، که برای پشتیبانی از پژوهشهای بنیادی در تعامل انسانها، ماشینها و اجزای حرکتی ایجاد شده است.
این پروژه دو تخصص منحصر به فرد در این دانشکده را به هم مرتبط میکند. Martin مهارت خود را در زمینه راه رفتن و حرکت انسان برای توسعهی وسایل کمکی ارائه میکند. مشارکت Cheng در روشهای یادگیری ماشین و تکنیکهای تقویت و بهینهسازی هدایت رباتیک متمرکز خواهد شد.
در حالی که این پروژه در حال حاضر تنها دادههایی از اسکلت بیرونی را که در آزمایشگاه به رایانه متصل شده است، جمع آوری می کند، پژوهشگران امیدوارند که این فناوری در دنیای واقعی نیز قابل اجرا باشد.
Cheng گفت: در حالت ایدهآل، ما میخواهیم که اسکلت بیرونی بتواند میزان راحتی را اندازهگیری کند و هدایت آن را در حالتی که شخص اسکلت را در زندگی روزمره پوشیده است، بهینه کند.
به گفتهی Martin، در مسیر توسعهی رباتیک کمکی کاربرپسند و پیشرفتهتر، این پروژه نشاندهندهی یک قدم محکم و رو به جلو است.
Martin گفت: این پروژه به ما کمک میکند تا بفهمیم که چگونه انسان و ماشین را به همکاری موثر با یکدیگر وادارند و اینکه چگونه چنین چیزی میتواند در نهایت به مردم کمک کند.
بیشتر بخوانیم:
» حضور Technaid در اگزو برلین ۲۰۱۹
» امکان ساخت ارتش سایبورگ تا سال ۲۰۵۰
» نخستین میکروربات با ماهیچه های نرم: RoboBee
منبع: PnnStateNews
«استفاده و بازنشر مطالب تنها با ذکر لینک منبع و نام (مجله فناوریهای توان افزا و پوشیدنی) مجاز است.»