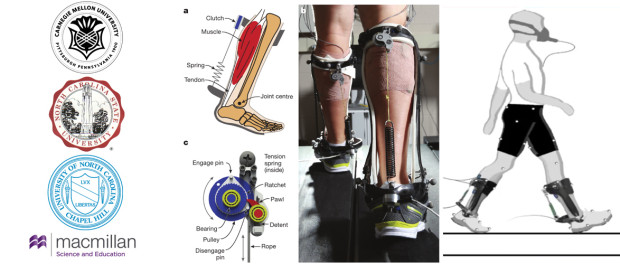
اسکلت بیرونی غیرفعال مچ پا، کاهندۀ میزان سوخت و ساز بدن فرد سالم هنگام راه رفتن روی سطح هموار، دانشگاه کارولینای شمالی در Chapel Hill و دانشگاه ایالتی کارولینای شمالی، ۲۰۱۵
اسکلت بیرونی غیرفعال مچ پای معرفی شده در مقالهای با عنوان کاهش میزان سوخت و ساز بدن انسان هنگام راه رفتن با بکارگیری اسکلت بیرونی غیربرقی، بزرگترین توسعه اسکلت بیرونی در سال ۲۰۱۵ است. دکتر Greg Sawicki به همراه گروه خود و دوستانش توانست رباتی پوشیدنی را بسازد و آزمایش کند که میزان سوخت و ساز بدن فرد سالم را هنگام راه رفتن به اندازه ۲٫۶±۷٫۲ درصد کاهش میدهد. میزان سوخت و ساز بدن با اندازهگیری اکسیژن مصرفی فرد هنگام پوشیدن اسکلت بیرونی اندازهگیری میشود. نرخ سوخت و ساز با تأمین انرژی از سوی اسکلت بیرونی کاهش مییابد ولی از طرفی نیز به دلیل انرژی مصرف شده توسط کاربر برای جابجایی اسکلت بیرونی افزایش مییابد. کاهش کلی در میزان سوخت و ساز بدن به این معنی است که سودمندی دستگاه پوشیدنی بیشتر از هزینۀ پوشیدن آن است.
اسکلت بیرونی غیرفعال مچ پا که در اصل در ژوئن سال ۲۰۱۵ معرفی شد، نقطۀ عطفی بزرگ در فناوری رباتهای پوشیدنی بود. فیلم زیر ارائهای است که بهتر از هر مقاله یا حتی گزارش اصلی پژوهش، پروژه را توضیح میدهد. این سمینار دکتر Sawicki که دانشمندان را پیرامون اسکلت بیرونی غیرفعال مچ پا راهنمایی میکند هنگام بازدید او از بخش مهندسی مکانیک دانشگاه Michigan Ann-Arbor ضبط شده است. در این فیلم دکتر Sawicki جزئیات کار خود بر روی اسکلت بیرونی غیرفعال مچ پا را از ایدۀ اولیه، همکاریها، عقبنشینیها تا موفقیتها و پروژههای آینده شرح میدهد. توضیحهای او درباره این پروژه مهم، فوق العاده است.
چرا این پروژه با اهمیت است؟
هم اکنون دو اردوگاه اصلی در جنبش اسکلتهای بیرونی توانافزا وجود دارد: اسکلت بیرونی فعال مفصل ران-زانو در برابر اسکلتهای بیرونی فعال مچ پا. شمار بسیار کمی اسکلت بیرونی مفصل ران-زانو-مچ پا (اسکلت بیرونی که توان پشتیبان را برای هر سه مفصل برای دستکم یک محور فراهم میکند) نیز وجود دارد. اسکلتهای بیرونی مفصل ران-زانو تمامی اسکلتهای بیرونی توانبخشی تجاری را در بر میگیرد: Ekso، Rewalk، Hal، Indego، ExoAtlet، ARKE، Phoenix، AxoSuit، MODO و غیره. در اردوگاه اسکلت بیرونی مچ پا نیز موسسه Wyss، گروه Hugh Herr و کار دکتر Collins و دکتر Sawicki (همه وزنههای پژوهش و توسعه اندامهای مصنوعی) قرار دارند. موفقیت اسکلت بیرونی غیرفعال مچ پا به احتمال زیاد موجی تازه از اسکلتهای بیرونی تجاری را راه خواهد انداخت. در حال حاضر ارتش ایالات متحده یک لباس اسکلت بیرونی را آزمایش میکند که دارای سامانه فنری همانند با این پروژه در پاشنه ربات است.
دکتر Greg Sawicki کیست؟
دکتر Greg Sawicki دارای مدرک کارشناسی مهندسی مکانیک (۱۹۹۹) از دانشگاه Cornell، مدرک کارشناسی ارشد مهندسی مکانیک (۲۰۰۱) از دانشگاه California Davis و مدرک دکتری مکانیک عصبی انسان (۲۰۰۷) از دانشگاه Michigan, Ann-Arbor است. او دانشیار مهندسی پزشکی و همچنین دستیار مدیر و مدیر بخش مهندسی توانبخشی آزمایشگاه Human PoWeR متعلق به دانشکدۀ مشترک مهندسی پزشکی دانشگاه کارولینای شمالی در Chapel Hill و دانشگاه ایالتی کارولینای شمالی است. دکتر Greg Sawicki از سال ۲۰۰۷ روی اسکلتهای بیرونی مچ پا کار کرده است. برخلاف بسیاری از پژوهشگران اسکلتهای بیرونی او تمرکز خود را روی اسکلتهای بیرونی مچ پا حفظ کرده و اکنون کوشش هشت سالۀ او در این زمینه منجر به نتایج مثبت میشود.
میتوانید برای آشنایی بیشتر با دکتر Greg Sawicki و همچنین دستیابی به لیستی از مقالههای منتشر شده، به تارنمای NCSU او مراجعه نمایید. او همچنین سخنران کنفرانس پیش روی رباتهای پوشیدنی WearRAcon16 خواهد بود.
>> در همین زمینه بخوانید: نخستین همایش فناوریهای رباتیک پوشیدنی – فوریه ۲۰۱۶
دکتر Greg Sawicki در ارائۀ خود به پروژههای پیشین دکتر Collins اشاره میکند که برای آشنایی بیشتر با این پروژه میتوانید به سخترانی دکتر Collins دربارۀ اندام مصنوعی و اسکلتهای بیرونی مراجعه نمایید.
مقالۀ منتشر شده پیرامون این پژوهش را میتوانید در تارنمای NCSU ببینید.
منبع: exoskeletonreport.com


