:: نوشته Erico Guizzo و Evan Ackerman
ربات پژوهشی امدادگر هوندا در حال یادگیری بالا رفتن از نردبان
در فاجعۀ اتمی فوکوشیمای ژاپن جای خالی رباتهای امدادگر بسیار حس میشد. یکی از پرسشهایی که در آن زمان مطرح میشد آن بود که چرا شرکت Honda ربات ASIMO را (که یکی از پیچیدهترین و توانمندترین رباتهای انسان نماست) برای کمک به محل فاجعه نفرستاد؟ اگر بخواهیم پاسخی ساده به این پرسش بدهیم باید بگوییم که ASIMO نمیتوانست در چنین محیطهایی کاری انجام دهد. این ربات هیچ گاه قرار نبوده که به عنوان امدادگر در محیطهای سانحه دیده کاری انجام دهد بلکه برای کار در محیطهای اداری و به ویژه محیطهایی که دچار سوانحی مانند زمین لرزه، انفجار و … نشدهاند طراحی شده است. هوندا به خوبی از محدودیتهای ASIMO در مواجهه با این محیطها آگاه است و به همین دلیل است که این شرکت مشغول کار بر روی نسخهای تازه از ASIMO است که ویژۀ کار در محیطهای سانحه دیده طراحی شده است.
مهندسان شرکت HONDA در همایش بینالمللی رباتها و سامانه های هوشمند (IROS) از مجموعه همایشهای IEEE/RSJ که اکتبر امسال برگزار شد، به ارائۀ دو مقاله دربارۀ پژوهشهای خود بر روی رباتهای انسان نمای امدادگر پرداختند. آنها بیان داشتند که تمرکز خود را بر روی کارهای پیچیدهای مانند تغییر آهنگ گام برداشتن و بالا رفتن از نردبان قرار دادهاند. دیدن اینکه این ربات آزمایشی مبتنی بر ASIMO میتواند چنین کارهای تحسین برانگیزی را انجام دهد جای خوشحالی دارد.
البته باید گفت که دو مقالهای که هوندا در همایش IROS ارائه کرد اصلاً در مورد معرفی ربات جدید آنها نبود. نخستین مقاله “Dynamic Gait Transition Between Bipedal and Quadrupedal Locomotion” و مقالۀ دوم نیز “Robust Vertical Ladder Climbing and Transitioning Between Ladder and Catwalk for Humanoid Robots” نام داشت.
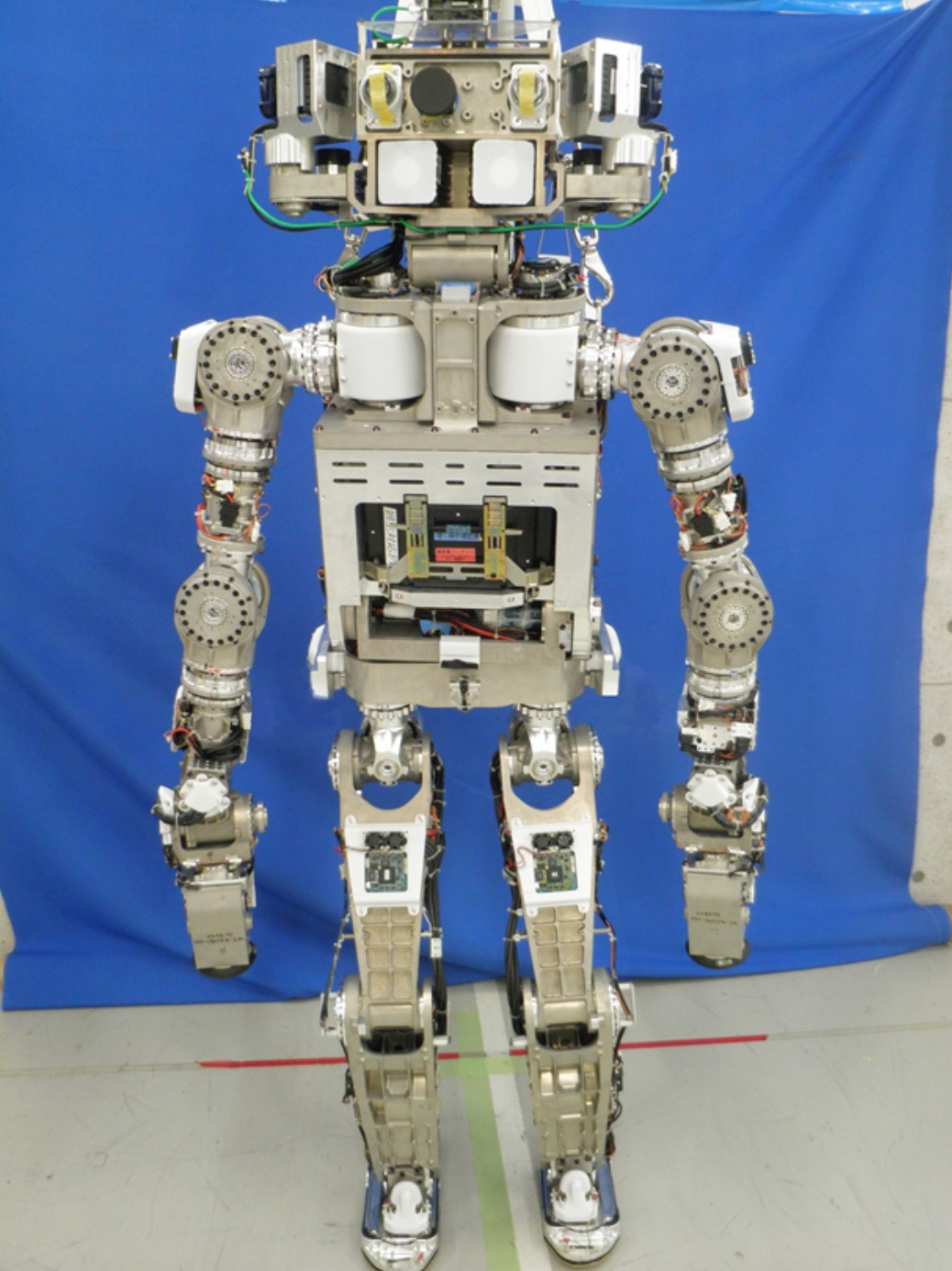
واضح است که این شرکت هنوز مشغول کار بر روی چارچوب تازۀ خود است و هنوز برای معرفی رسمی آن به جهان آماده نشده است. این ربات (شکل سمت چپ) حتی هنوز نام خاصی هم ندارد و شرکت هوندا آن را همچنان «ربات آزمایشی انسان نما» مینامد.
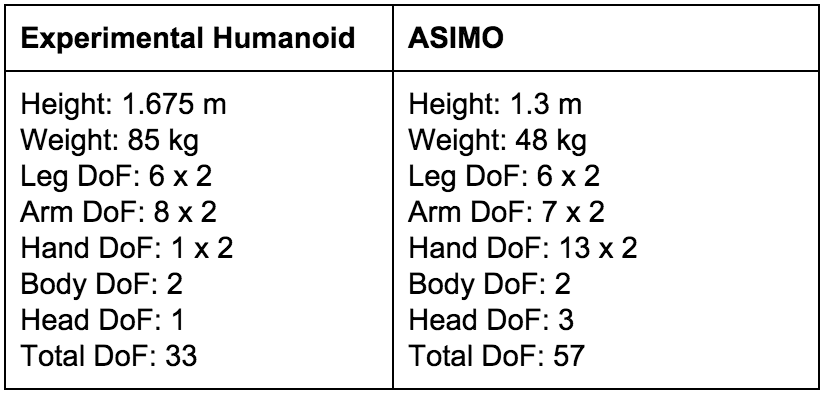
در اینجا میتوانید برخی از ویژگیهای این ربات را در مقایسه با ربات ASIMO ببینید:
به نظر میرسد این ربات حسگرهایی در ناحیۀ سرش دارد که البته ما نوع آنها را درنیافتیم. اما چیزی که بیشتر جلب توجه میکند آن است که به نظر میرسد این ربات منبع تغذیۀ خارجی ندارد و آن جعبۀ بزرگ پشت سر ربات احتمالاً باید نوعی باتری، منبع سوخت، یک رآکتور هستهای کوچک(!) یا یک چنین چیزی باشد. واضح است که این ربات تفاوتهای بسیاری با ASIMO دارد اگرچه باید انتظار داشته باشیم که ویژگیهایی از ASIMO در هر رباتی که هوندا میسازد وجود داشته باشد. ما از پژوهشگران هوندا خواستیم اطلاعات بیشتری به ما بدهند اما آنها ما را به رؤسای شرکت ارجاع دادند. به نظر میرسد قرار نیست کسی دربارۀ این پروژه اطلاعاتی به ما بدهد.
حال بیایید نگاهی به پژوهش پژوهشگران هوندا بیاندازیم تا شاید بتوانیم به حقایقی دربارۀ طرحهای آیندۀ آنها برای این ربات دست یابیم.

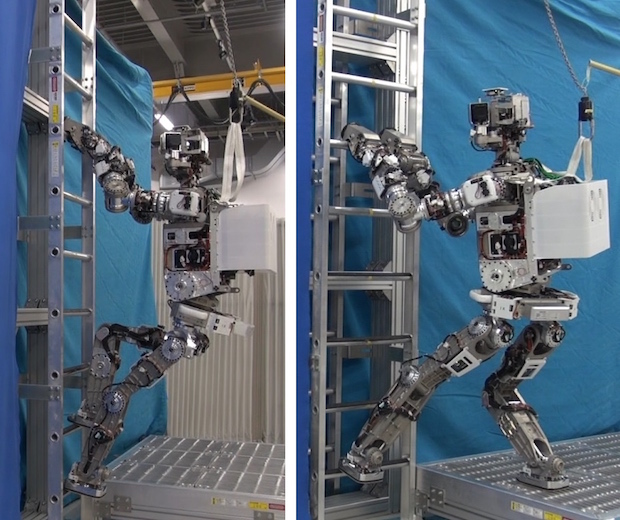
ربات میتواند از یک راه باریک به روی یک نردبان عمودی برود…

… و سپس خیلی خوب از پله ها بالا رود.
در آزمونهای اولیۀ رقابتهای رباتیکی DARPA، رباتها باید از پله هایی با شیب زیاد بالا میرفتند. انجام این کار برای رباتها بسیار دشوار بود و برای همین در مرحلۀ پایانی این رقابتها، پله ها کوتاهتر و با شیب کمتر در نظر گرفته شدند. شرکت هوندا برای عبور از پله ها وقت نگذاشته و به جای آن ربات آنها میتواند از یک نردبان عمودی بالا برود. این کار شامل قرار گرفتن روی آن از یک راهرو باریک و پایین آمدن از آن است. ما تا کنون شاهد چنین رفتاری از یک ربات نبوده ایم. انجام این حرکت اصلاً آسان نیست. زیرا نردبان خود لغزنده است و هر گونه لغزش، چرخش یا اشتباه در وضعیت حرکت ربات میتواند او را زمین بزند.
روش کنترلی هوندا تخمین برخط و مداوم وضعیت فیزیکی ربات و تنظیم کردن محلهای تماس برای جبران هر گونه خطاست که باعث «کنترل مقاوم حرکت ربات بر روی نردبان، جابجایی میان وضعیت قرار گرفتن بر روی نردبان و پایین آمدن از آن» شده است. به نظر میرسد این ربات میتواند خیلی نرم از نردبان بالا برود. هوندا گفته است که مشغول کار برای افزایش سرعت و کارایی حرکت ربات بر روی نردبان و به ویژه مراحل «trotting» و «pacing» است. فکر میکنم اینها واژههایی هستند که برای گامهای بالا رونده ای که به کمتر از دو گام در هر پله نیاز دارند به کار میروند.
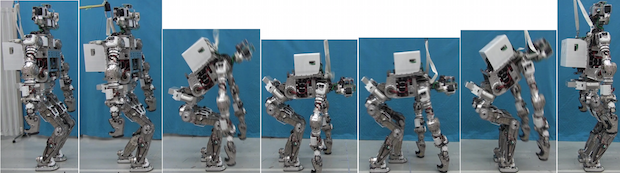
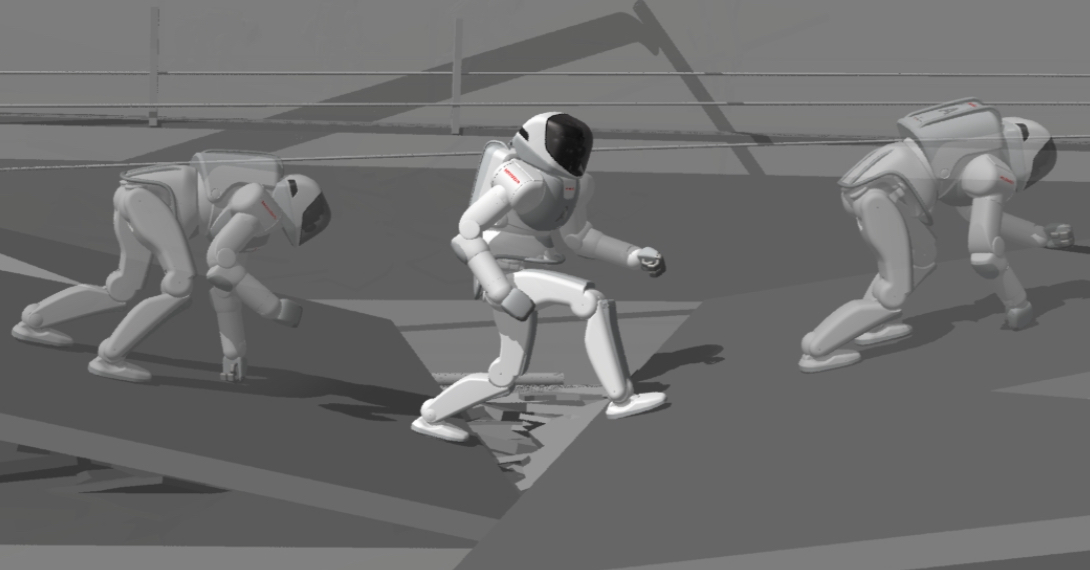
ربات میتواند به سرعت از وضعیت دوپا به چهارپا و برعکس برود.
در رقابتهای رباتیکی DARPA مزیت حرکت چند حالتی رباتها به خوبی مشخص شد. منظور رباتهایی هستند که تنها محدود به راه رفتن بر روی دو پا نیستند و میتوانند با چرخ نیز حرکت کنند یا آنکه میتوانند در صورت نیاز به شکل چهار دست و پا راه بروند. Honda نیز در حال آزمودن این ایده است البته با این شرط که این کار شکل انسانی ربات آنها را تغییر ندهد. آنها درواقع در حال ساختن یک میمون رباتیک هستند.
ربات Honda بر خلاف بقیۀ رباتهای انسان نمایی که قابلیت راه رفتن چهار دست و پا را دارند میتواند وضعیت خود را در حال حرکت و بدون به حفظ یک مرکز جرم ثابت از حالت دو پا به چهار پا و برعکس تغییر دهد. این ربات میتواند این کار را به شکل خودکار و خیلی سریع در دو ثانیه انجام دهد. ربات برای انجام این کار شیوۀ جالبی دارد: ربات این کار را با چرخاندن یک جفت چرخ طیار در بدن خود انجام میدهد. واقعاً جالب نیست؟! ربات میتواند با همان سرعت به حالت ایستاده بازگردد و همۀ این کارها را هنگام حرکت در سرعت ۰٫۵ کیلومتر بر ساعت انجام دهد. نرمافزار حفظ تعادل، بخشی از الگوریتمهایی است که ASIMO را روی پاهای خود نگه میدارد. پژوهشگران امیدوارند بتوانند نرمافزاری برای برنامهریزی حرکت ربات بنویسند تا ربات بتواند به طور فعال و پیوسته در محیطهای مختلف حرکت کند.
تصویری از ایدۀ Honda برای حرکت ربات امدادگر خود
از ظاهر وضعیت کنونی این پژوهش میتوان گفت بعید نیست که Honda این پروژه را اندکی پس از فاجعۀ فوکوشیما آغاز کرده باشد. مسئولان این شرکت به شدت محافظه کارند و اسرار کارهای خود را به خوبی حفظ میکنند. بنابراین پی بردن به خبرهای این شرکت تا همین اندازه هم برای ما خوش اقبالی محسوب میشود. احتمالاً از این پس هر از گاهی خبرهایی از پژوهشهای هوندا خواهیم شنید. چرا که این شرکت تصمیم گرفته به پژوهشگرانش اجازۀ شرکت در همایشها و ارائۀ پژوهشهایشان را بدهد. ما نمیدانیم پایان این راه به چه ختم میشود یا اینکه چه زمانی یک ربات «کامل» را خواهیم دید. اما دیدن اینکه Honda همچنان فعالانه بر روی رباتهای امدادگر کار میکند دلگرم کننده است. امیدواریم به زودی خبرهای بیشتری در این زمینه ببینیم.
منبع: IEEE Spectrum


